Règlement

Mécanique
A la vue de la grande complexité du thème 2014, nous avons décidé de proposer deux robots afin de faire toutes les actions possibles.
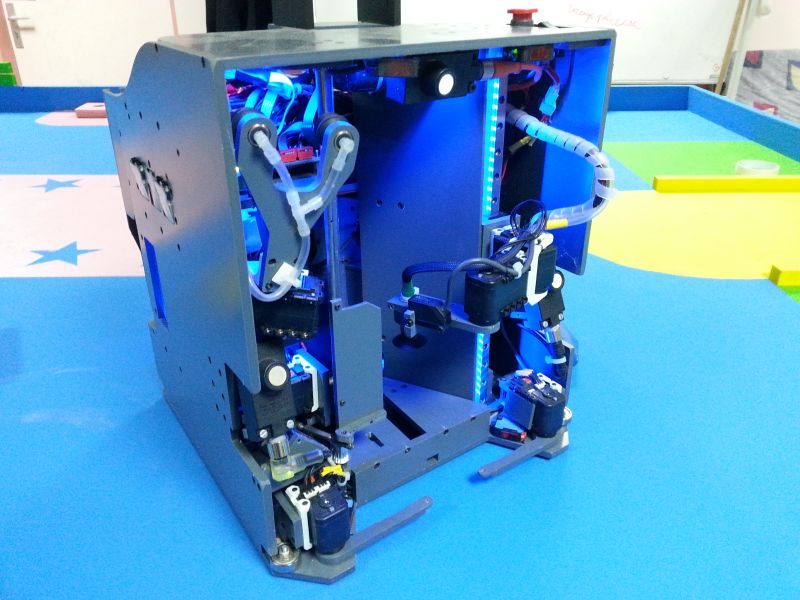
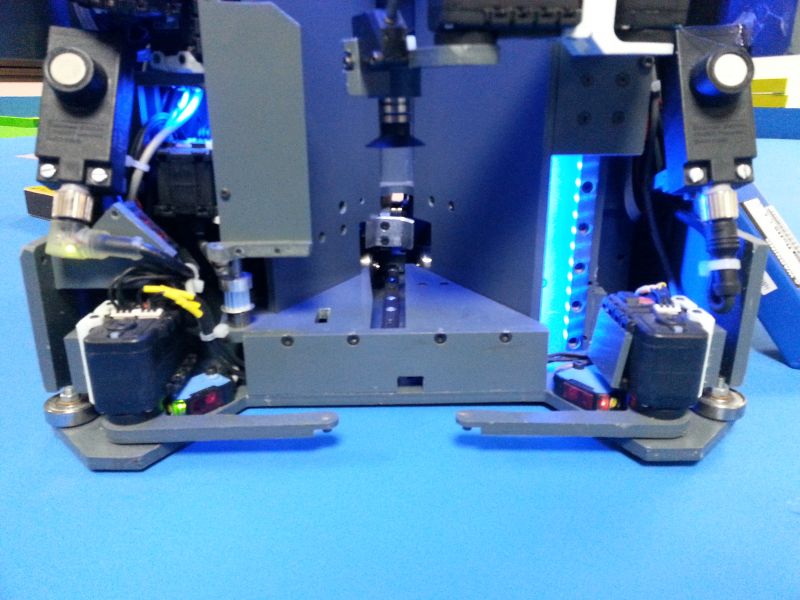
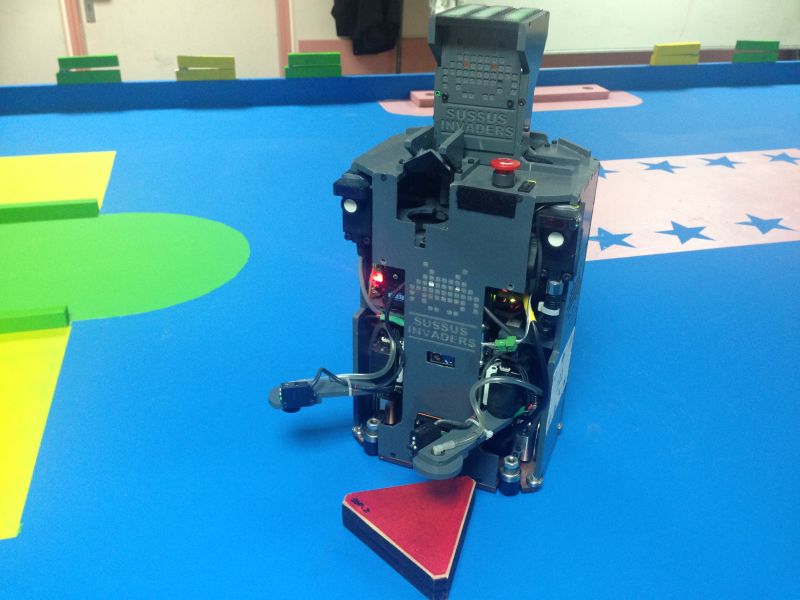
Présentation du robot principal :
Le gros robot s’occupe des feux et des fruitmouths.
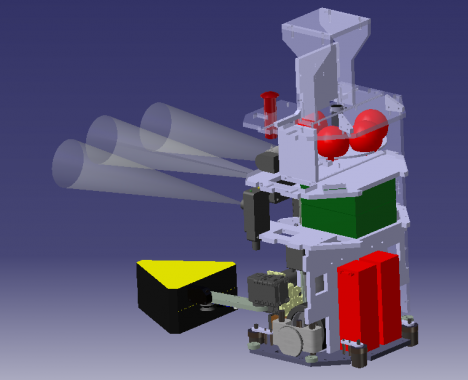
Le système feux se compose de 4 sous-systèmes.
- Le système récupération des feux muni de 2 AX12.
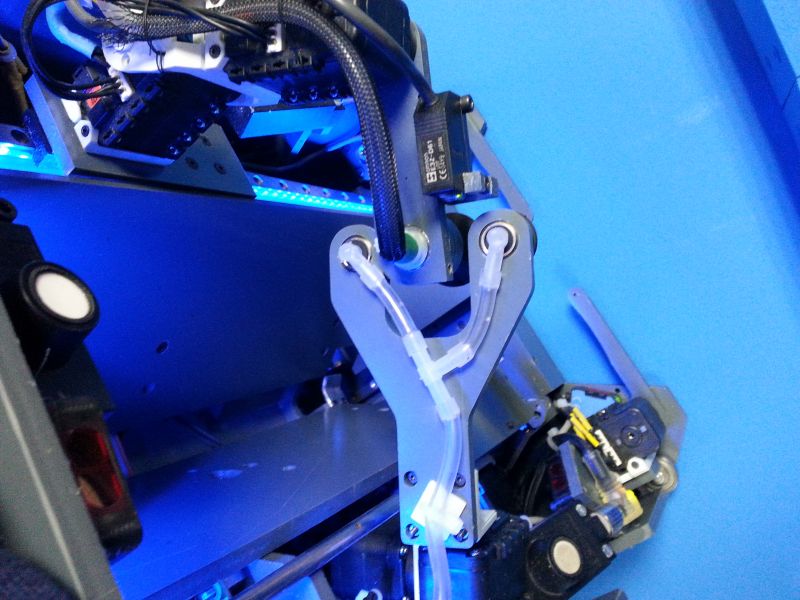
- Le robot comprend un ascenseur asservi en position. Le bras sur l’ascenseur se compose de 2 AX12 et utilise une ventouse pour manipuler les feux.

- Un système de retournement se compose de 2 AX12 muni de 2 ventouses pour maintenir le feu lors du retournement.
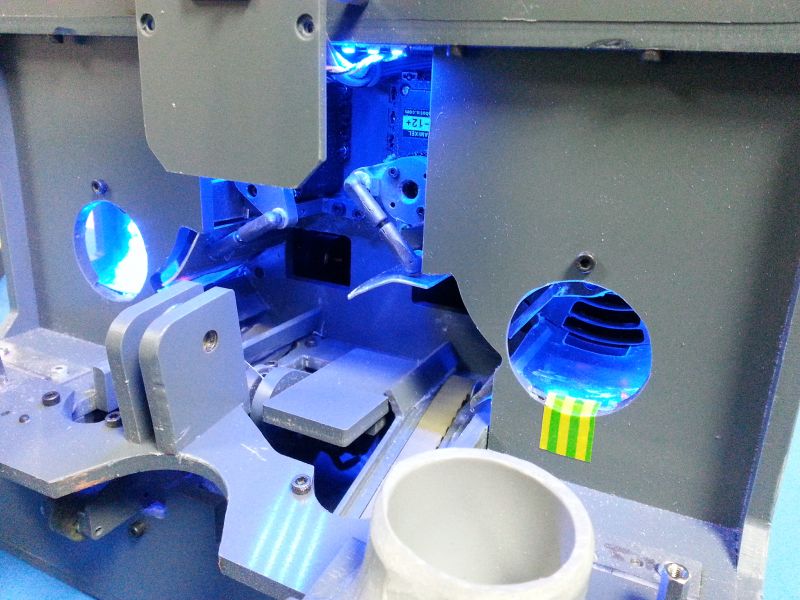
- Le robot peux stocker 6 feux retenus par une porte motorisée avec un AX12. Pour être plus rapide l’évacuation des feux se fait à l’aide d’un moto-réducteur asservi en position qui pousse les feux les uns après les autres sur la zone bonus.
Le système fruitmouths situé à l’arrière du robot se compose de 3 sous-systèmes:
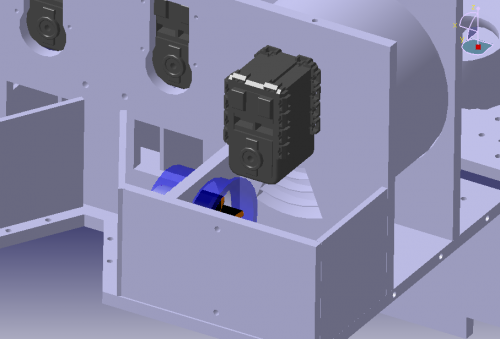
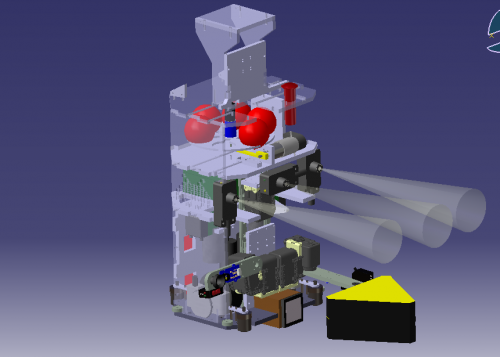
- Le robot possède une grosse griffe pivotante qui tourne à l’aide d’un moto-réducteur de rapport 132:1 asservi en position. Pour récupérer les fruitmouths le robot baisse sa double griffe, puis recule, remonte la griffe et ré-avance pour faire tomber deux fruitmouths. il recommence l’opération 2 fois pour vider un arbre.

- Une fois décroché, les fruitmouths sont aspirés dans 2 barillets (2x AX12) à l’aide de 2 turbines. Le barillet permet de détecter la couleur du fruitmouth et un stockage optimal.

- L’évacuation des fruitmouths dans le barillet se fait latéralement à l’aide de petites portes grâce à 2 AX12. les fruitmouths tombent sur deux petits tapis roulant.

Fiche technique:
- 2 moto-réducteurs propulsions (Faulhaber 2842 et réducteur 23/1 14:1)
- 4 moto-réducteurs asservi en position
- 11 servomoteurs AX12
- 2 pompes à vide
- 2 turbines
- 2 moto-réducteurs en commande directe
- 12 capteurs
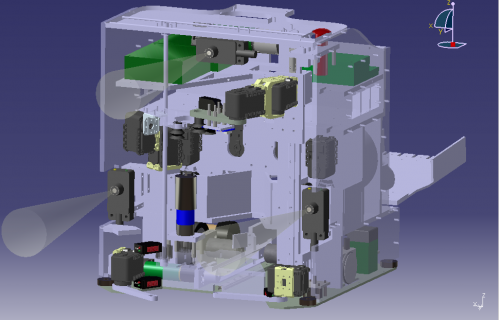
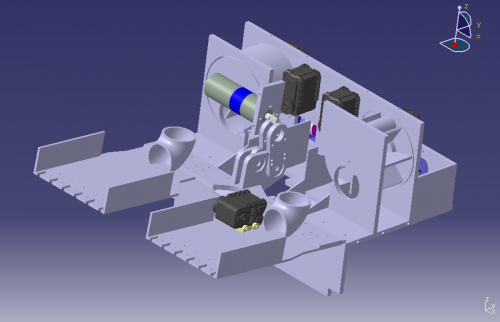
Modélisation sous CATIA V5 du robot principal:
Présentation du robot secondaire :
Le petit s’occupe de déposer les fresques, de projeter les lances, de voler des feux adverses, et enfin de lancer le filet sur le mamouth.
Le système feux comprend 2 bras 3 axes motorisés par des aX12. Ces bras sont munis de ventouse pour manipuler les feux. Le robot peut ainsi les retourner ou encore aller piller les zones bonus adverse. Le robot détecte la couleur des feux grâce à un capteur couleur situé sur le devant du robot.

Sur l’axe Z des bras nous avons mis en place un télémètre laser permettant de scanner les zones bonus et d’aller piller la zone si besoin.
Le système lances est composé d’un barillet asservie en position à l’aide d’un petit moto-réducteur et la catapulte projette les lances sur le mammouth grâce a un petit moto-réducteur de rapport 4:1.

Le système filet se compose de 2 tiges en PVC retenu par une gâchette. Celles-ci sont actionnées par un AX12 et les tiges se comportent comme un ressort projetant ainsi le filet sur le mammouth à plus de 1 mètre de distance.
Fiche technique:
- 2 moto-réducteurs propulsions
- 2 moto-réducteurs asservi en position
- 6 servomoteurs AX12
- 2 pompes à vide à piston
- 1 télémètre laser
- 7 capteurs
Modélisation sous CATIA V5 du robot secondaire:
Électronique
L’électronique de nos deux robots repose sur nos cartes PLVL et carte moteurs.
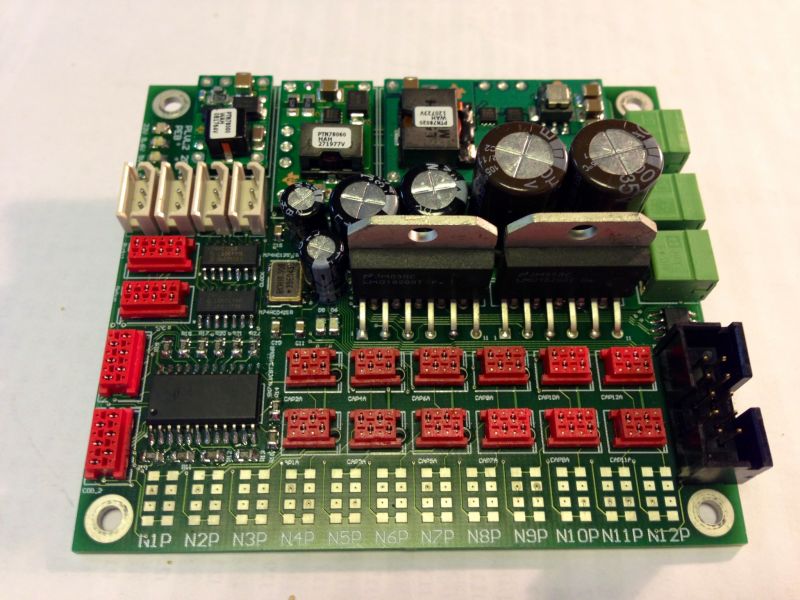
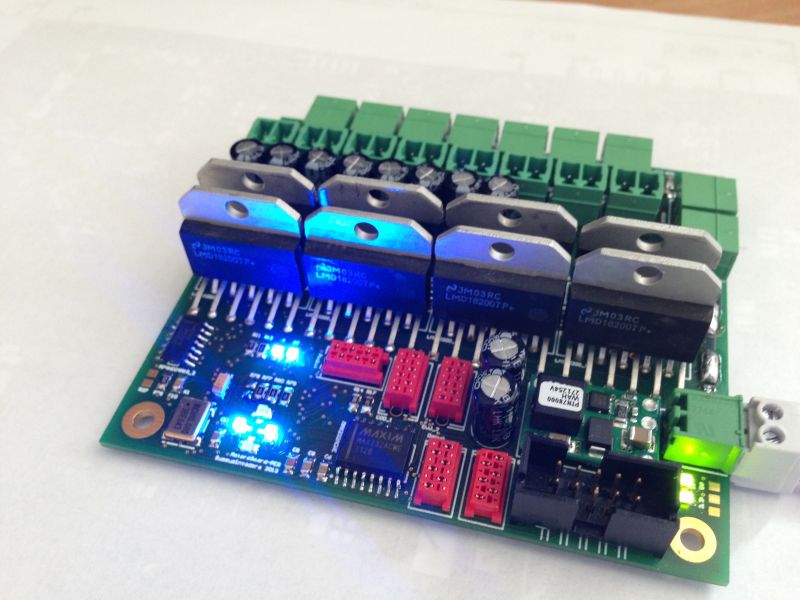
Le hardware étant au point, il s’agit exactement des mêmes cartes que l’année passée.
Cependant nous avons revu la partie logiciel afin de répartir différemment les taches de chaque carte.
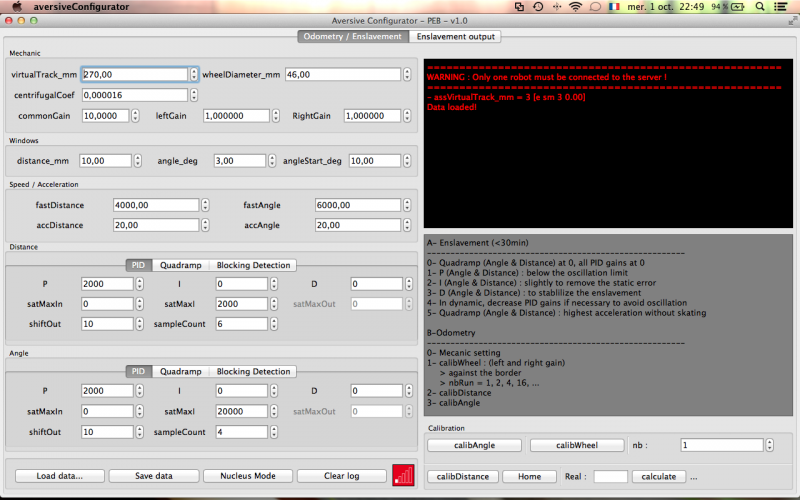
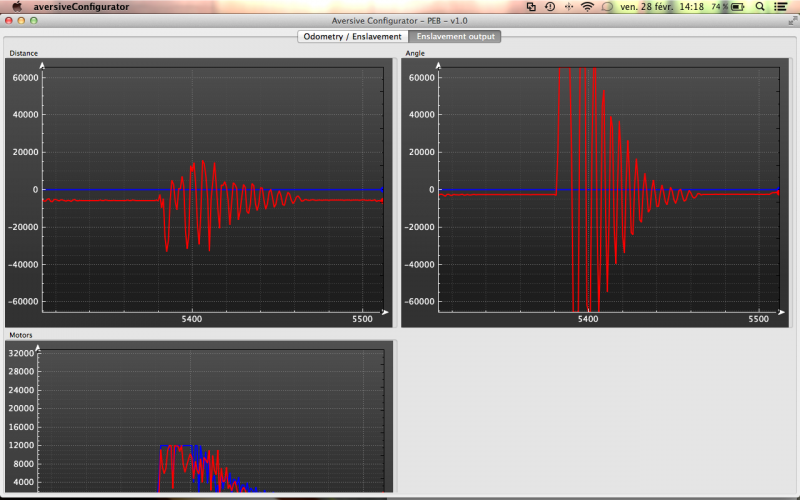
Ainsi cette année nous utilisons un jeu de deux cartes PLVL dans chaque robot (plus une carte moteur dans le robot 1). La 1er carte PLVL est dédiée à l’ordonnancement des taches stratégiques et d’automatismes alors que la seconde se charge des calculs d’asservissement du robot.
Ainsi ce jeu de cartes nous permettait de gérer, sur le robot 2 :
– 6 servomoteurs ax12
– 6 moteurs
– 4 encodeurs
– 12 capteurs
sur le robot 1, avec l’aide d’une carte moteur en plus :
– 10 servomoteurs ax12
– 10 moteurs
– 5 encodeurs
– 15 capteurs
Une liaison I2C permet d’établir une communication entre toutes les cartes.
Si vous souhaitez plus d’informations au sujet de nos cartes électroniques, je vous invite à visiter les pages de nos robots précédent.
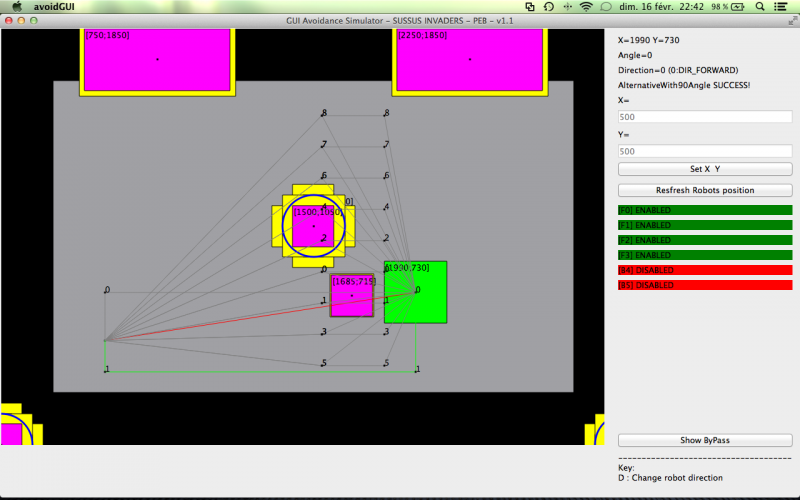
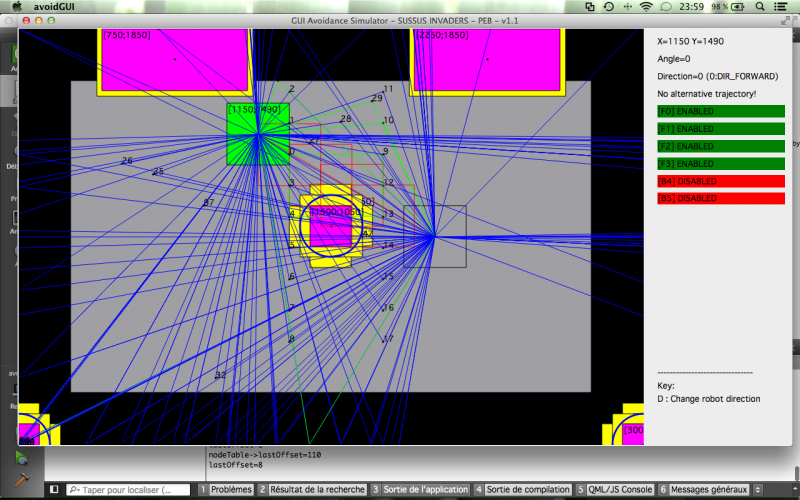
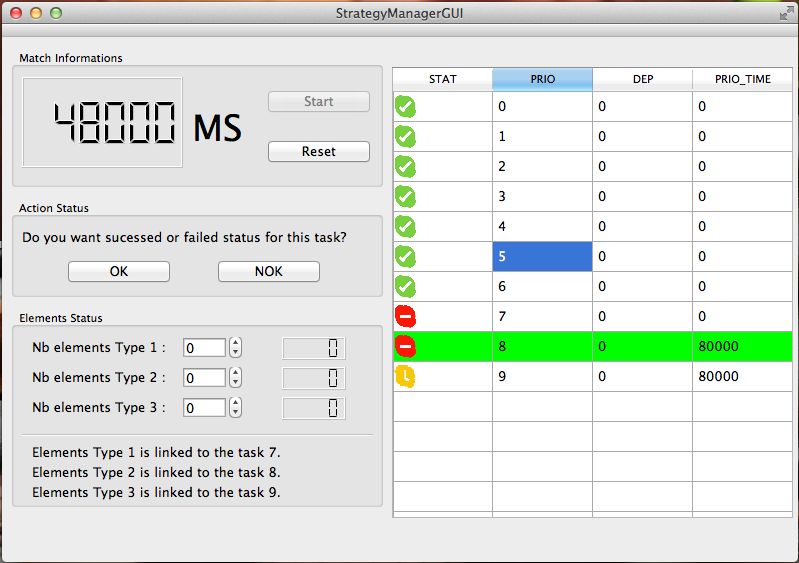
Logiciel
Photos
[peg-image src= »https://lh3.googleusercontent.com/-ATW8INoHhQc/VEl1kE_9YlI/AAAAAAAAAlY/Se4C4UG2_AsBYyo5F6c0yQVYeSKQ2EN3gCHM/s144-o/robots2014_2.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514835163570770″ caption= » » type= »image » alt= »robots2014_2.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-cmjP9vX5Y9Y/VEl1jczWv1I/AAAAAAAAAlQ/yIW4f4nNdEY-K8sJKKFgP0pJ9N5BSYqOQCHM/s144-o/robots2014_1.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514824373288786″ caption= » » type= »image » alt= »robots2014_1.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-sWc9pnt7VcI/VEl1joPIUMI/AAAAAAAAAlU/zVJCA3Ms8Ew4OVktRAunDW-XL1C1S6iMgCHM/s144-o/robot2_2014.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514827442573506″ caption= » » type= »image » alt= »robot2_2014.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-L64svgb5Mfo/VEl1Tw-FLGI/AAAAAAAAAk4/wesCpzAGlMU9vw2z6xu7pN1hi9m9AxSrgCHM/s144-o/Catia%2BR21.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514554909076578″ caption= »Catia R21.PNG » type= »image » alt= »Catia R21.PNG » image_size= »761×617″ ] [peg-image src= »https://lh3.googleusercontent.com/-MsSZ-ODN9MU/VEl1TTa1R2I/AAAAAAAAAk0/w-PtNuVPm8gonusm0GyYohO7zQHkMM7uQCHM/s144-o/Catia%2BR2.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514546976606050″ caption= »Catia R2.PNG » type= »image » alt= »Catia R2.PNG » image_size= »861×615″ ] [peg-image src= »https://lh3.googleusercontent.com/-t2qK_dEMP7k/VEl1SS9sMNI/AAAAAAAAAko/xHa8E2erzgYWBzQA4IPmElkl7PTaBL_ZQCHM/s144-o/Catia%2BR1%2Bfruitmouths.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514529674506450″ caption= »Catia R1 fruitmouths.PNG » type= »image » alt= »Catia R1 fruitmouths.PNG » image_size= »959×618″ ] [peg-image src= »https://lh3.googleusercontent.com/-wC-flevGp6U/VEl1QiRUPXI/AAAAAAAAAkY/oT-B2nz8F7ECgY5_TxT-2GtUsH8u_DbvgCHM/s144-o/Catia%2BR1%2Bfruitmouths%2Bzoom%2Baspi.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514499423616370″ caption= »Catia R1 fruitmouths zoom aspi.PNG » type= »image » alt= »Catia R1 fruitmouths zoom aspi.PNG » image_size= »907×616″ ] [peg-image src= »https://lh3.googleusercontent.com/-2ZyI7YUmFyc/VEl1O_27nnI/AAAAAAAAAkQ/O2a-2xu0KFcODemU__QmUKpJdRABMqDnwCHM/s144-o/Catai%2BR1.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514473006276210″ caption= »Catai R1.PNG » type= »image » alt= »Catai R1.PNG » image_size= »970×622″ ] [peg-image src= »https://lh3.googleusercontent.com/-le2fMDj04XQ/VEl1U30HALI/AAAAAAAAAlA/8DV1TyXRzq8xoZtN4R0lQQPJhEnAlXX7wCHM/s144-o/20141022_205324.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514573926170802″ caption= » » type= »image » alt= »20141022_205324.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-CEzeSuGxrGs/VEl1RBwFxHI/AAAAAAAAAkg/QNWEcIm1L1wsCQCMtCQQy4KYXKly8TbjACHM/s144-o/20141022_205305.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514507874190450″ caption= » » type= »image » alt= »20141022_205305.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-JkmFs0rvjac/VEl1Ml_hKHI/AAAAAAAAAkI/AZsp4V2A63UPUkVba_ygIG7XXti0S4KbQCHM/s144-o/20141022_205257.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514431703230578″ caption= » » type= »image » alt= »20141022_205257.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-Zzx8Ld_YWUk/VEl1MFfG0-I/AAAAAAAAAkE/NbCQqou_l04oJkbcuX6WrmUQU-vOrXMggCHM/s144-o/20141022_205252.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514422977352674″ caption= » » type= »image » alt= »20141022_205252.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-oOBOYz9c79g/VEl1G5yFsCI/AAAAAAAAAj4/S9D_fE3hHSA4Q3xYNSKrUWhAq9ShZPXmQCHM/s144-o/20141022_205233.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514333936398370″ caption= » » type= »image » alt= »20141022_205233.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-84RVsskOOeg/VEl0-bFNmgI/AAAAAAAAAjw/9h_u7rhw5MIaYbsm1IIQQYRL_Tib8VMLgCHM/s144-o/20141022_205228.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514188256156162″ caption= » » type= »image » alt= »20141022_205228.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-a1mmv8ElT1g/VEl09vEF1pI/AAAAAAAAAjs/xe8mcw1kbNkXzL7x9BAAm6cZcszk4xO5ACHM/s144-o/20141022_205203.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514176440293010″ caption= » » type= »image » alt= »20141022_205203.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-2VXLbQ7Xx7Y/VEl04co-h3I/AAAAAAAAAjg/-0vsk1nUs2wmzqmzkJ7H11UHKd_TssIdwCHM/s144-o/20141022_205137.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514085595383666″ caption= » » type= »image » alt= »20141022_205137.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-G8PWfVaiLBQ/VEl012NZosI/AAAAAAAAAjY/HmTCFfO6PzoALuMcWanLpdkmDOrRnWnIwCHM/s144-o/20141022_205115.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073514040919433922″ caption= » » type= »image » alt= »20141022_205115.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-MBo_p-Jd7eY/VEl0qMvRXwI/AAAAAAAAAjA/9R8tCnn4TJYqISweAPbg9IPls_JyGvItQCHM/s144-o/20141022_205041.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513840808648450″ caption= » » type= »image » alt= »20141022_205041.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-FkXHyIODrrs/VEl0ud5IzKI/AAAAAAAAAjQ/2rtSgnUW5osXpI3CmVF9yeCTYVNUiQTlACHM/s144-o/20141022_205029.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513914132909218″ caption= » » type= »image » alt= »20141022_205029.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-5L-cHYy4tTM/VEl0q_EufjI/AAAAAAAAAjI/V8hcOcrLjhwnos8wL0xr0DCH1O3K5CnpwCHM/s144-o/20141022_205020.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513854320410162″ caption= » » type= »image » alt= »20141022_205020.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-CN5uxeTFZPY/VEl0h2vsiLI/AAAAAAAAAi4/3pXZBPVUwFgivOph9QMQwLxrWgJbtEKCgCHM/s144-o/20141022_205014.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513697465895090″ caption= » » type= »image » alt= »20141022_205014.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-YJnx6IarYKw/VEl0gx6skUI/AAAAAAAAAiw/vTfwNo65TT00ZIRnWab7mrBrxMcw19_zACHM/s144-o/20141022_204929.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513678989988162″ caption= » » type= »image » alt= »20141022_204929.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-6K0uT4PpE7g/VEl0eLzuXhI/AAAAAAAAAio/gZLMBAbOwtA0ViFlLXzJA7Ji8gjGrTT4gCHM/s144-o/20141022_204920.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513634400460306″ caption= » » type= »image » alt= »20141022_204920.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-vCEC4mvTR64/VEl0VdqqmMI/AAAAAAAAAic/8dURO_yZxII2x9CxX4hcHIDAnjFjP5G1wCHM/s144-o/20141022_204910.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513484575480002″ caption= » » type= »image » alt= »20141022_204910.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-2SxtBTZN2Nc/VEl0Vx6CSXI/AAAAAAAAAig/fZpPvYwFcYc8Qvd4S9XSSr6PWo4qPvIRACHM/s144-o/20140530_042659.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513490008656242″ caption= » » type= »image » alt= »20140530_042659.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-9Q7qc6eewmo/VEl0PNia2oI/AAAAAAAAAiI/gY8EGU8BqKsaXuxzFncgaqsIh-YJT_AygCHM/s144-o/20140316_231125.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513377166711426″ caption= » » type= »image » alt= »20140316_231125.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-um_2uxPICdU/VEl0TeSXfvI/AAAAAAAAAiQ/mN7TYXsufxArY4Uln_kuIL3qe2WNwxxoACHM/s144-o/20140315_192901.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513450382262002″ caption= » » type= »image » alt= »20140315_192901.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-VrrJLmcvJ48/VEl0MONqkfI/AAAAAAAAAiA/vnk3ro3Yk_8Me_5QYFk8bI-83raRnP_0wCHM/s144-o/20140314_173427.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513325808488946″ caption= » » type= »image » alt= »20140314_173427.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-nQezZZIbrTM/VElz7UYhmjI/AAAAAAAAAhs/obXvbWNSvc8mYVl1JD6UzacbGl_SlINFgCHM/s144-o/20140307_170848.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513035406875186″ caption= » » type= »image » alt= »20140307_170848.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-Bf94y6UoJt8/VElz7o0yzCI/AAAAAAAAAhw/DHfHF8mV2_spR-jL8BjDM5c3Yp1BuFHqwCHM/s144-o/20140110_182429.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513040894151714″ caption= » » type= »image » alt= »20140110_182429.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-yaBnz9ETBOE/VElz8m2r1RI/AAAAAAAAAh4/2QU1ysejtd8DYd3IH4I_dmelK-18mtP-QCHM/s144-o/20140104_193545.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6073513057545082130″ caption= » » type= »image » alt= »20140104_193545.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-PXw6fXo0Xts/VCx1lAVxYmI/AAAAAAAAAg8/KxaUn-RT-t4gnvj22-UhpqNqPax1wi6-ACHM/s144-o/strategyManagerGui.png » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065352076768141922″ caption= » » type= »image » alt= »strategyManagerGui.png » image_size= »799×563″ ] [peg-image src= »https://lh3.googleusercontent.com/-3FJ57sWftLs/VCx1lxTa65I/AAAAAAAAAhE/_OIr2roz8Nssy4AUnPoyS0sO1bZFjJYnwCHM/s144-o/nucleus_server.png » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065352089911618450″ caption= » » type= »image » alt= »nucleus_server.png » image_size= »1280×800″ ] [peg-image src= »https://lh3.googleusercontent.com/-uhz0j3BxOG0/VCx1kdFp8uI/AAAAAAAAAgw/kLo1Iuj-qv4M9CEAQwLtVYao4EfnYQSpACHM/s144-o/avoidance_1.png » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065352067305304802″ caption= » » type= »image » alt= »avoidance_1.png » image_size= »1280×800″ ] [peg-image src= »https://lh3.googleusercontent.com/-uDjMrad-JiU/VCx1kW1INeI/AAAAAAAAAg0/hTTo6mOICIgeprI__dVrsu0OjexKlTMcwCHM/s144-o/avoidance_0.png » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065352065625372130″ caption= » » type= »image » alt= »avoidance_0.png » image_size= »1280×800″ ] [peg-image src= »https://lh3.googleusercontent.com/-iMk-_tfK2HE/VCx1jWIV0qI/AAAAAAAAAgk/zRicqXYj3e4wcJf9jbxqzvjtozNQZsjhwCHM/s144-o/aversiveConfigurator_2.png » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065352048257651362″ caption= » » type= »image » alt= »aversiveConfigurator_2.png » image_size= »1280×800″ ] [peg-image src= »https://lh3.googleusercontent.com/-bnfMflV09t0/VCx1izfdNPI/AAAAAAAAAgg/i1Gec0Lm3OEspOm0sWxiImTWns0yZmn8ACHM/s144-o/aversiveConfigurator_1.png » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065352038959363314″ caption= » » type= »image » alt= »aversiveConfigurator_1.png » image_size= »1280×800″ ] [peg-image src= »https://lh3.googleusercontent.com/-ek9-jlkNl7Q/VCxjF1v_eRI/AAAAAAAAAfE/BTm8gMx4iqooHL_krgAcUqcrAkezNKceQCHM/s144-o/IMG_2439.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065331750140082450″ caption= » » type= »image » alt= »IMG_2439.JPG » image_size= »640×480″ ] [peg-image src= »https://lh3.googleusercontent.com/-PPOTnL8LlL4/VCxjDkLQi3I/AAAAAAAAAe8/7llOgdgYKtsxZIGcuY3f43_jXzITuCKuACHM/s144-o/IMG_2194.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065331711062870898″ caption= » » type= »image » alt= »IMG_2194.jpg » image_size= »1816×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-OgkXoegVXo8/VCxjIAO39JI/AAAAAAAAAfM/QlEiHnJuv2Qd2IFz__RzHtD3ZRC_TQ1NQCHM/s144-o/IMG_2186.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065331787313706130″ caption= » » type= »image » alt= »IMG_2186.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-xocUs0F2Mdc/VCxipb8ZTTI/AAAAAAAAAes/eatXrZCmUi4dwV95oX4TwhbHVAh7aj6cwCHM/s144-o/IMG_2100.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065331262176447794″ caption= » » type= »image » alt= »IMG_2100.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-E0c12v8kEAE/VCxipN1bNwI/AAAAAAAAAeo/9oWaE9egF7gtpfyWUmF7qhTZ3L9bIWL_wCHM/s144-o/IMG_2099.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065331258389116674″ caption= » » type= »image » alt= »IMG_2099.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-K5-uGgHwxZY/VCxiYsyPcxI/AAAAAAAAAec/Ao94Dcqp8_8TzXzs5ihlwJ5Kw2iyF_orgCHM/s144-o/IMG_2096.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330974639485714″ caption= » » type= »image » alt= »IMG_2096.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-r_tuevUcFrU/VCxiXF6MAkI/AAAAAAAAAeU/4OprW-m3RC4PimXENLn7F6TIKEjZnoscACHM/s144-o/IMG_2043.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330947023962690″ caption= » » type= »image » alt= »IMG_2043.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-eFT7TCUMQLQ/VCxiH-SZL7I/AAAAAAAAAeM/5g7f1_bKhMgNcg8TbZiWaGHtH_n4xG_2wCHM/s144-o/IMG_2015.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330687279968178″ caption= » » type= »image » alt= »IMG_2015.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-qygYZyVLGtM/VCxiDITqzRI/AAAAAAAAAeE/jUd3STJPDjEfH6ZeHKTEHf_VHcvEHuG6QCHM/s144-o/IMG_1969.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330604070325522″ caption= » » type= »image » alt= »IMG_1969.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-axd613zXtRs/VCxh1w_XVII/AAAAAAAAAd8/eeUvkPts74wmYJQ3rM47FwVGefqhUxx9wCHM/s144-o/IMG_1968.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330374472848514″ caption= » » type= »image » alt= »IMG_1968.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-DUrg5_14oRI/VCxhwhwK2pI/AAAAAAAAAd0/R5pgwOJzZFY-nvE7E5VymeEx97zi3xilQCHM/s144-o/IMG_1967.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330284483238546″ caption= » » type= »image » alt= »IMG_1967.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-4UsZKLK1c_U/VCxhmjXLNXI/AAAAAAAAAds/QIDfCIayUHg2E_24V997W7AHXymRju92ACHM/s144-o/IMG_1966.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330113116583282″ caption= » » type= »image » alt= »IMG_1966.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-jrpsGyh2VmY/VCxhgwUTrkI/AAAAAAAAAdk/u30Tl_BWqPQlMB4Bo12bdyaETshrd23lwCHM/s144-o/IMG_1958.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065330013515001410″ caption= » » type= »image » alt= »IMG_1958.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-XZh7MlCuwHo/VCxhXLdZaAI/AAAAAAAAAdc/bcrJ_Xg-1U8-PJjdiDlr3OnjizQT1-eQwCHM/s144-o/IMG_1945.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329849002190850″ caption= » » type= »image » alt= »IMG_1945.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-qnvSsYyydYg/VCxhR0zNblI/AAAAAAAAAdU/2QpeY8bYjfUKn_3-9sAONTT1lWberRGWwCHM/s144-o/IMG_1942.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329757020319314″ caption= » » type= »image » alt= »IMG_1942.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-BEDeo88Z09s/VCxhAYorGGI/AAAAAAAAAdE/iFAYpLBQNyIw8iaaNmYXwEAc0RTW6rcIwCHM/s144-o/IMG_1932.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329457402157154″ caption= » » type= »image » alt= »IMG_1932.PNG » image_size= »1024×768″ ] [peg-image src= »https://lh3.googleusercontent.com/-zIfFy4HhZq0/VCxg-QhC3LI/AAAAAAAAAc8/QS5u55gVJcc86VVDVxpo4v2OIQrtjbqyACHM/s144-o/IMG_1931.PNG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329420862938290″ caption= » » type= »image » alt= »IMG_1931.PNG » image_size= »1024×675″ ] [peg-image src= »https://lh3.googleusercontent.com/-S_-UkcFzINU/VCxhElMB1AI/AAAAAAAAAdM/SfYr7B13jpcW33GmgKjvvbrRk4BPRpSjACHM/s144-o/IMG_1930.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329529491149826″ caption= » » type= »image » alt= »IMG_1930.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-of0Qik3f80E/VCxg7iUJjLI/AAAAAAAAAc0/NTjrjQHM9449fUG8aeXjg7Fnn32hw83CgCHM/s144-o/IMG_1929.JPG » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329374101081266″ caption= » » type= »image » alt= »IMG_1929.JPG » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-Kjf8VyJ5rz8/VCxg3Joaf2I/AAAAAAAAAcs/y_rHP61inEIeSvBA7WqJM2oISoPpHHMqwCHM/s144-o/IMG_1928.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329298755714914″ caption= » » type= »image » alt= »IMG_1928.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-vf1YeX335J8/VCxgoUfgc1I/AAAAAAAAAcc/bndw8SNtiNkNpgBeRpaix8sAyfHAuB8GACHM/s144-o/IMG_1926.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329043973108562″ caption= » » type= »image » alt= »IMG_1926.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-ABgPtehtkUc/VCxgskL2U8I/AAAAAAAAAck/XJupKCkcQps12GCJj4jQxcVWusxK-8P3QCHM/s144-o/IMG_1925.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065329116905100226″ caption= » » type= »image » alt= »IMG_1925.jpg » image_size= »1536×2048″ ] [peg-image src= »https://lh3.googleusercontent.com/-g-4ncgbNj7Y/VCxi58JD0SI/AAAAAAAAAe0/nIo6102tntozkmUsqC1a0ChvIZCoLZnoACHM/s144-o/IMG_2101.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2014#6065331545697407266″ caption= » » type= »image » alt= »IMG_2101.jpg » image_size= »1536×2048″ ]