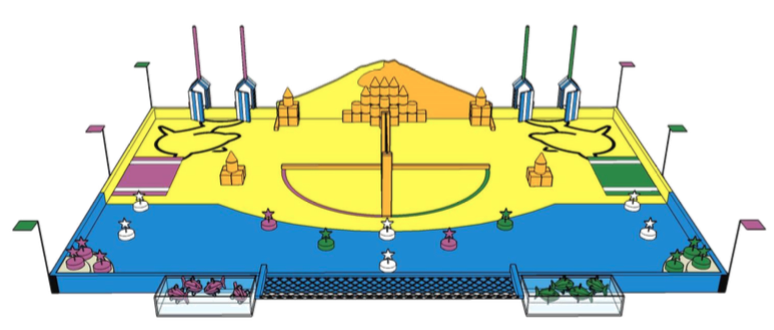
Règlement: » The Beach Bots »
Mécanique:
Voici les robots pour l’édition 2016 de la coupe de France de robotique:
Le robot principal s’occupe de la construction de la muraille et des cabanes de plage.
Le robot secondaire s’occupe du moyen tas de sable et de la pêche au poissons.
La conception:
Afin d’optimiser au maximum l’agencement interne des robots nous les modélisation en 3D dans le logiciel CATIAV V5. Cette exercice nous permet de maximiser les encombrements des actionneurs et de l’électronique :
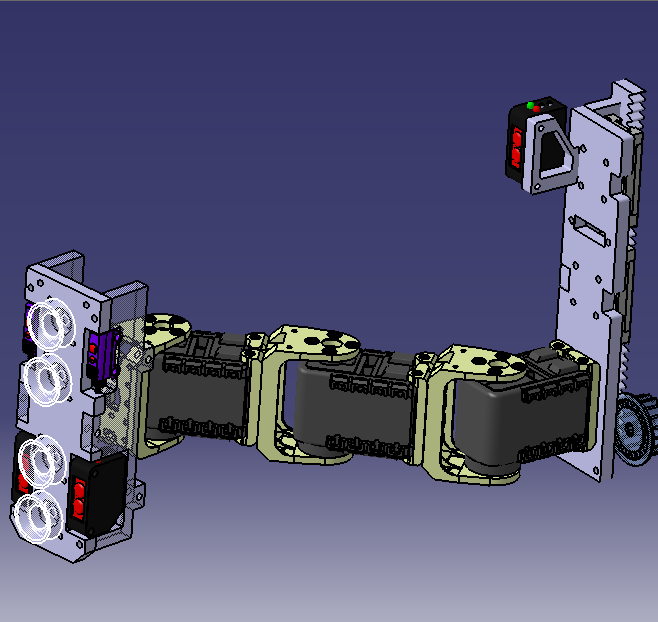
Modèle 3D du robot principal:
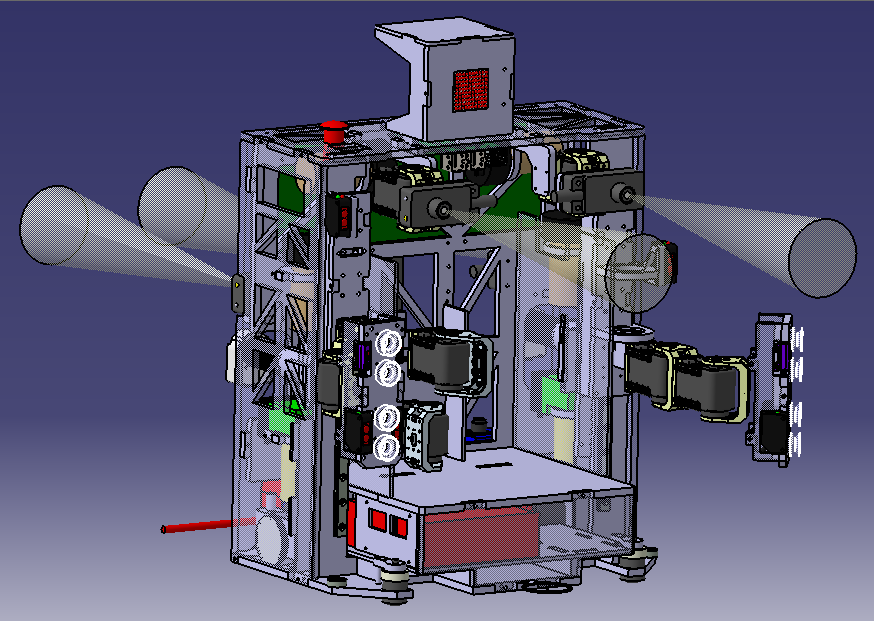
Ci dessous le modèle 3D du bras 4 axes avec les 4 ventouses et les 4 capteurs infrarouges:
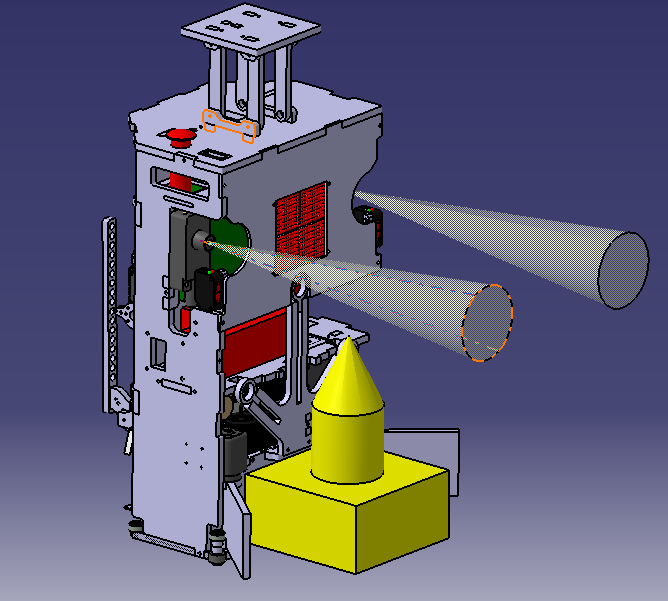
Modèle 3D du robot secondaire:
La réalisation:
Les robots sont construits à l’aide d’un assemblage de plaques PVC 6mm découpées avec une fraiseuse numérique:
Robot principal:
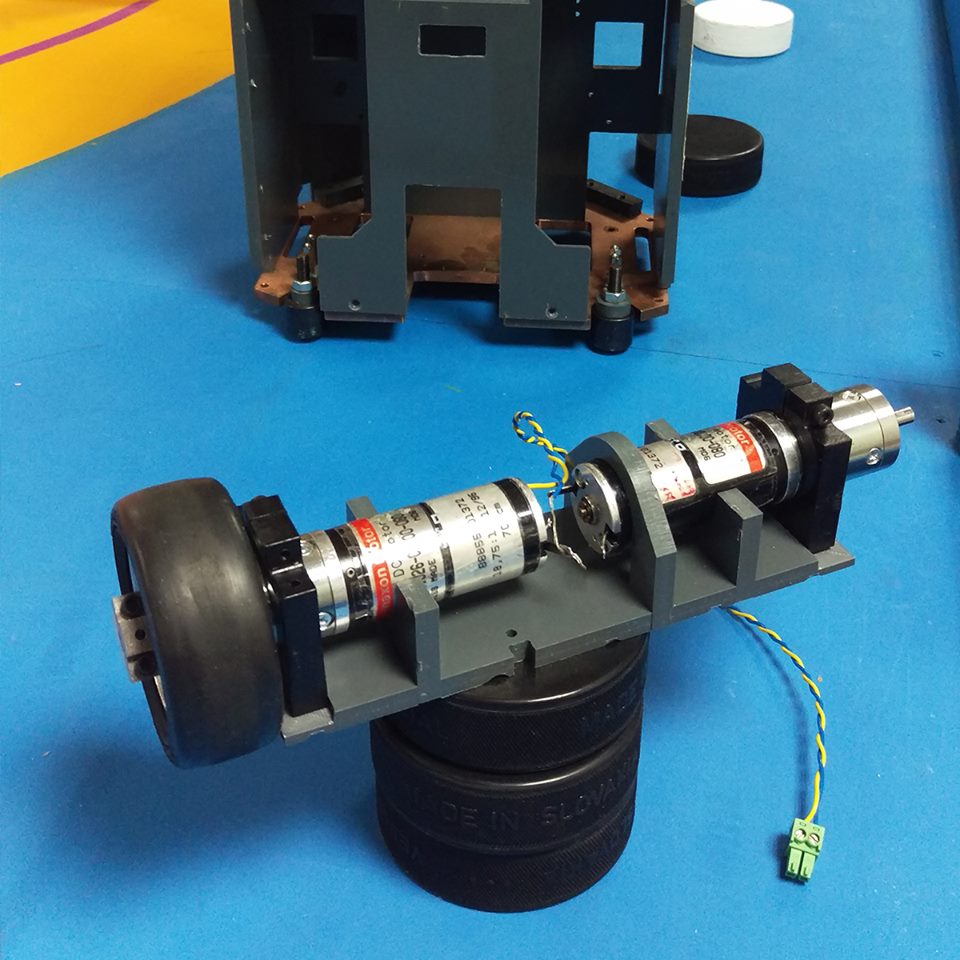
Bloc moteur 2016 du robot principal:
Robot secondaire:

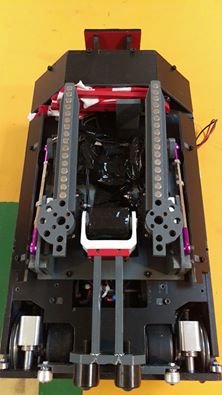
Vue arrière du robot:

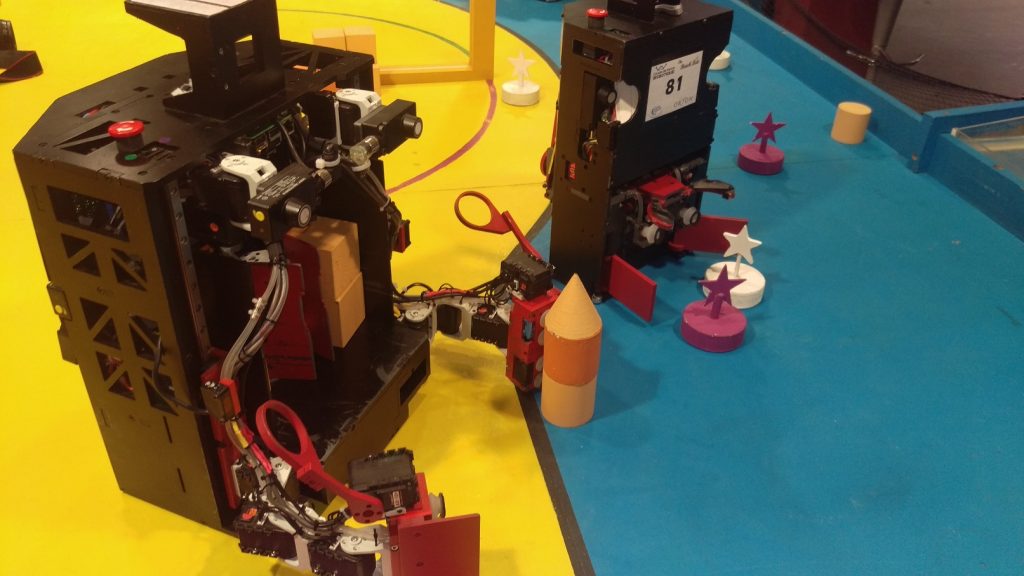
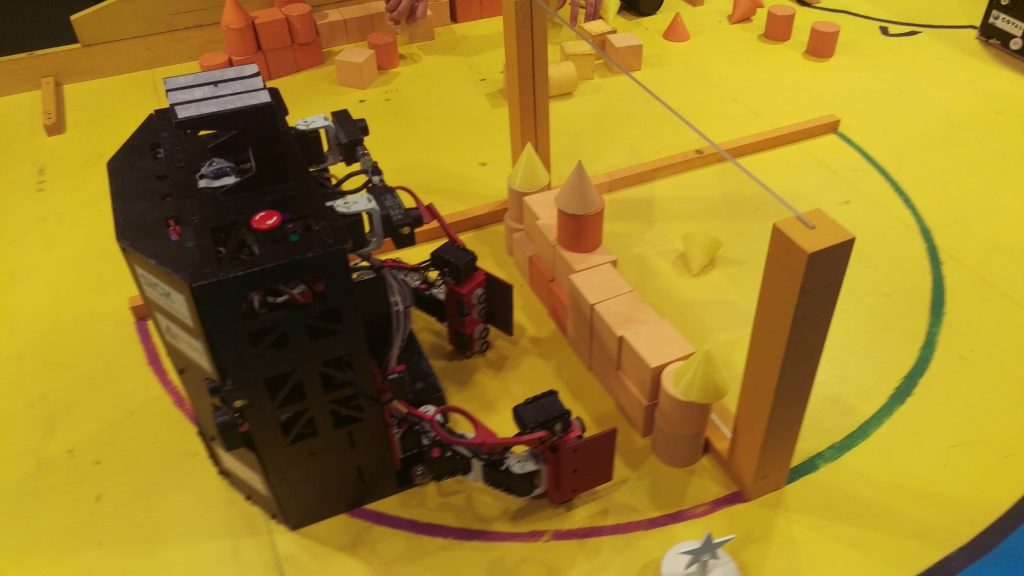
Les robots en action sur le plateau de jeu:

Ci dessous une video de test de la fermeture des cabines de plage:
https://www.facebook.com/sussusinvaders/videos/579736115529100/
Électronique:
Cette année nous avons changé l’architecture électronique de nos robots. En effet, lors des précédentes coupes, l’électronique de nos deux robots reposait uniquement sur nos cartes PLVL et sur nos cartes moteurs.
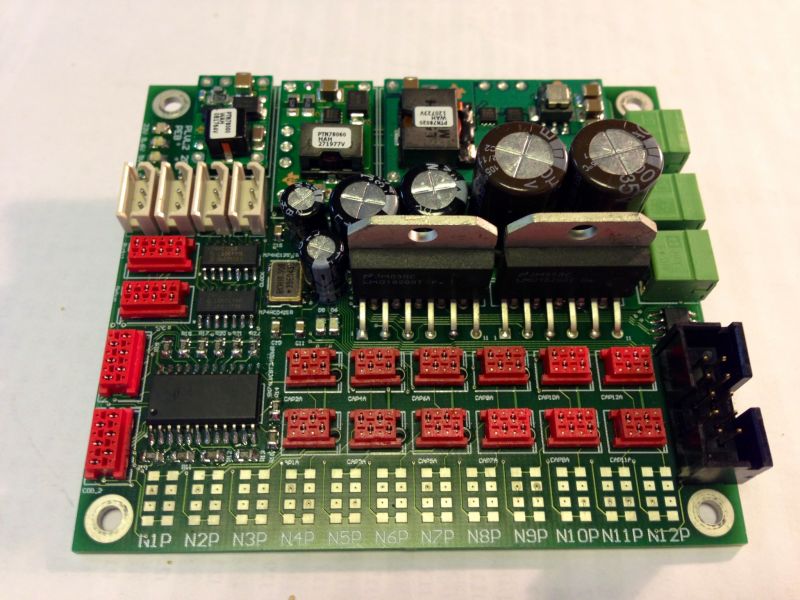
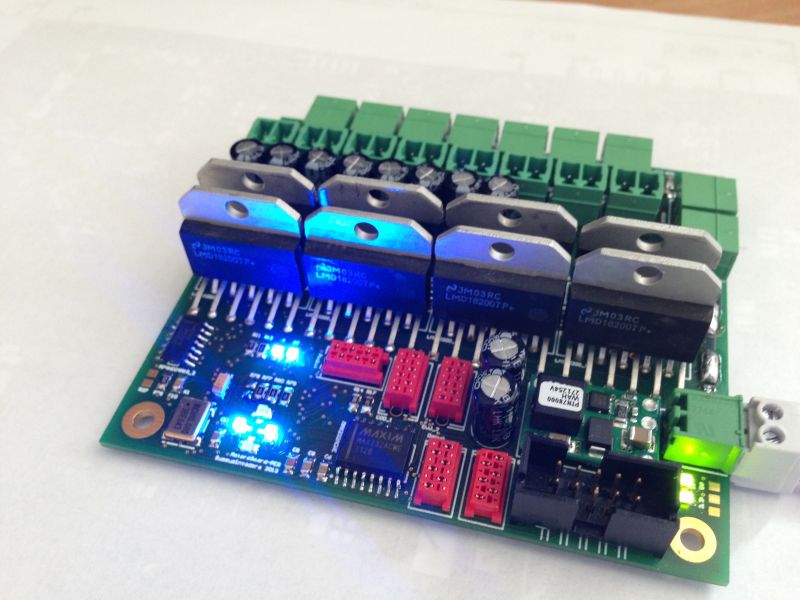
Nous avons aussi utilisé ces cartes cette année, mais nous avons ajouté une RaspberryPi 2. L’idée est d’utiliser les cartes ainsi :
- RaspberryPi 2 : gère l’ordonnancement des taches stratégiques, des automatismes et la gestion des obstacles
- PLVL 1 : gère les calculs d’asservissement du robot
- PLVL 2 : gère les actionneurs du robot (une sorte de carte IO)
- Carte Moteurs (robot 1 uniquement) : gère les moteurs en plus 🙂
La RaspberryPi 2 est équipée d’un Linux (Distribution Poky générée à l’aide de Yocto). Ce choix a été motivé par une volonté d’efficacité lors de la programmation du robot et du debug de notre logiciel. Le uC Dspic est long à programmer, nécessite de brancher le programmateur, de redémarrer le robot,… Maintenant la programmation se fait par wifi en quelques secondes! Le debug lui est beaucoup plus simple aussi.
Une liaison I2C permet d’établir une communication entre toutes les cartes.
Si vous souhaitez plus d’informations au sujet de nos cartes électroniques, je vous invite à visiter les pages de nos robots précédent.

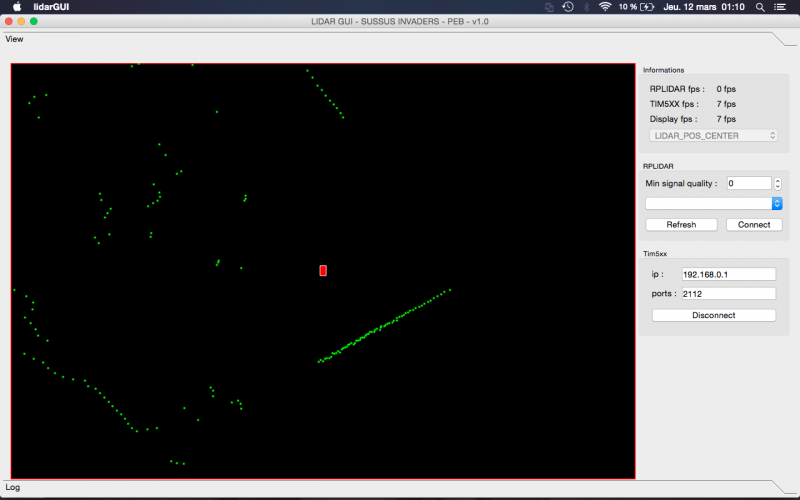
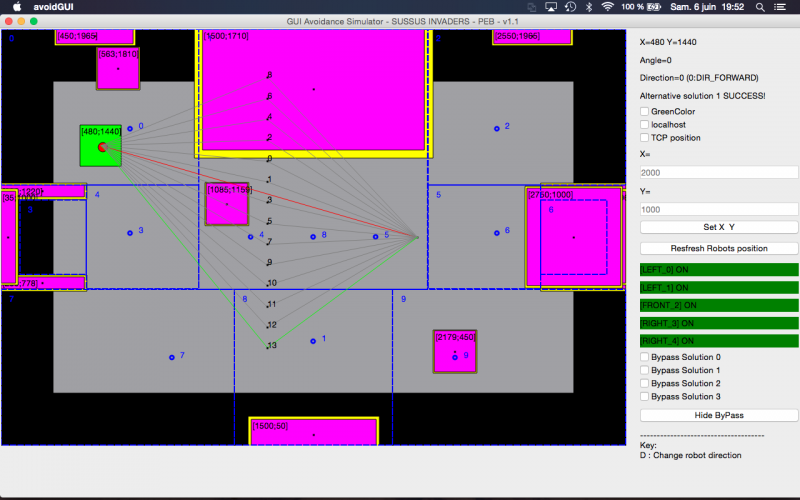
- faire l’acquisition des données renvoyées par le Lidar
- calculer la position des robots adverses
- renvoyer les positions à nos robots via notre réseau Wifi

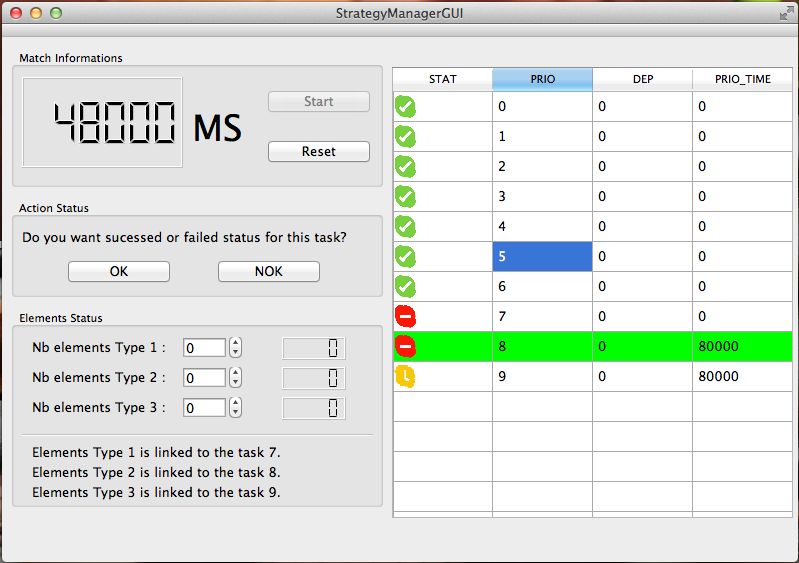
Logiciel