Règlement: » Moon Village! »
Règlement 2017 : C2017_Rules_FR
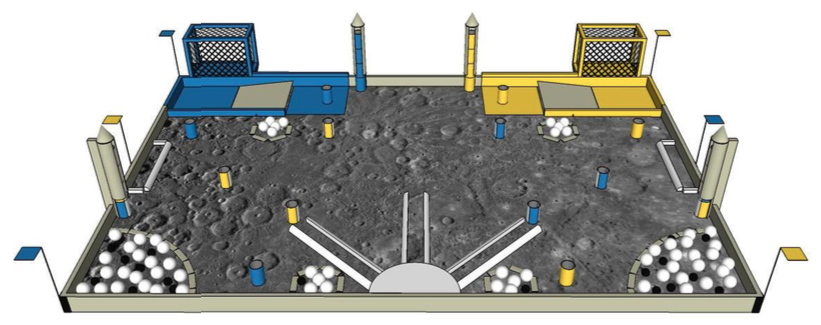
Pour marquer des points lors de l’édition 2017, les robots auront plusieurs possibilités :
- Ramasser des minerais / de la roche lunaire (2 points)
- Construire une base lunaire (10 points par module lunaire valide)
- Faire décoller au moins un engin vers Mars (20 points)
Mécanique
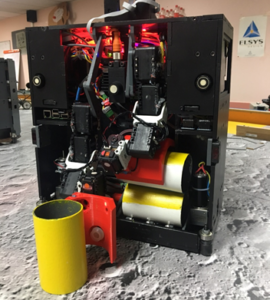
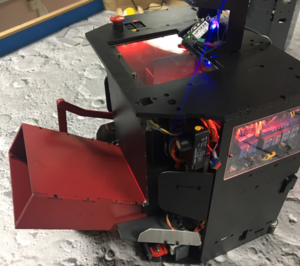
Voici les robots pour l’édition 2017 de la coupe de France de robotique:

Le robot principal:
•Gestion des modules:
– 2x bras 4 axes
– 2x système de retournement
•Gestion du titanes:
– 2 turbines + 1 AX12
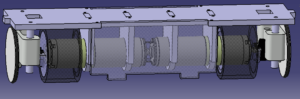
Modélisation du bloc moteur:
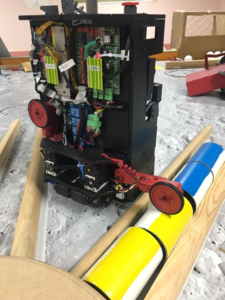
Le robot secondaire:
•Gestion des modules monochromes:
– 2 bras de tassement
-2AX12 + ventouse
•Scan et retournement des polychromes:
– 2 bras capteur couleur et moteur
•Fusée:
– 1 AX12 + ressors

Électronique/Logiciel embarqué
Cette année :
- Robot 1 :
- (x1) RaspberryPi 2
- (x2) cartes PLVL (carte maison)
- (x1) carte Moteur (carte maison)
- (x1) carte alimentation 12V pour pompes , cartes relais…
- (x1) carte alimentation 5V pour Raspberry
- (x2) driver turbines
- (x4) relais automobiles
- (x2) sondes de temperature K
- (x2) capteurs de couleur I2C
- Robot 2:
- (x1) RaspberryPi 2
- (x2) cartes PLVL (carte maison)
- (x2) cartes alimentations pour pompes et lidar
- (x1) carte 4 relais
- (x2) capteurs de couleur I2C
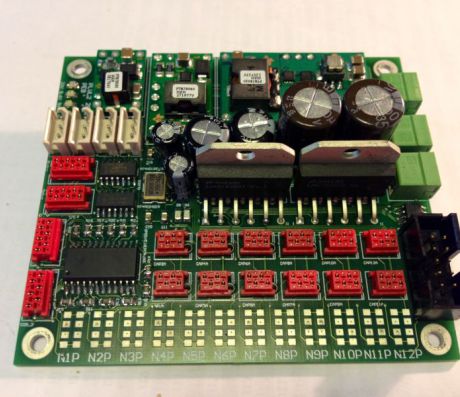
carte PLVL
carte moteurs
RaspberryPi 2
En charge de dérouler la stratégie, les automatismes, et l’évitement de haut niveau (Lidar sur le second robot). Une distribution GNU/Linux maison basée sur Yocto équipe nos Raspberry afin de répondre parfaitement à nos besoins.
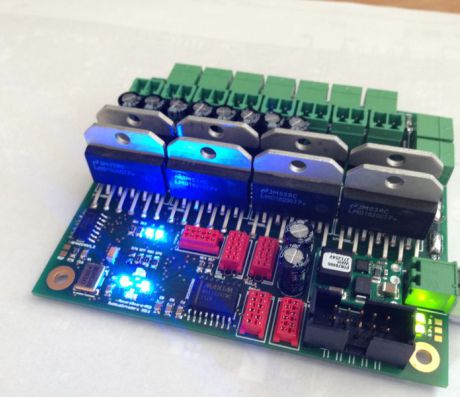
PLVL IO
Du fait du nombre important d’actionneur utilisé, une carte s’occupe exclusivement de traiter les commandes envoyées par la Raspberry afin de bouger les moteurs, les servo-moteurs, de faire les acquisitions capteurs, codeurs, … Cette carte équipée d’un Dspic 33E a de quoi faire avec nous 🙂
PLVL asservissement
La base hardware est une PLVL (uC Dspic 33E) aussi, mais consacrée uniquement à l’asservissement et à l’évitement de bas niveau. Cette seconde carte est nécessaire pour gérer les 5 capteurs US et 2 IR dédiés à l’évitement adversaire de bas niveau et au bon déroulement de notre boucle d’asservissement (5ms).
Bus de communication
Cette année comme les années précédentes (et pour la dernière année), nos cartes communiquaient via un BUS I2C. La Raspberry est maitre sur le bus et les autres cartes esclaves. Nous avons eu quelques sueurs à la coupe car des problèmes de CEM ont lourdement perturbé nos deux premiers match de qualification (mise en rade du BUS = arrêt du robot). Après blindage des nappes et filtrage avec quelques capa le robot est reparti 🙂
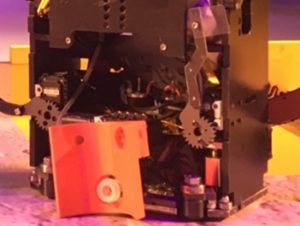
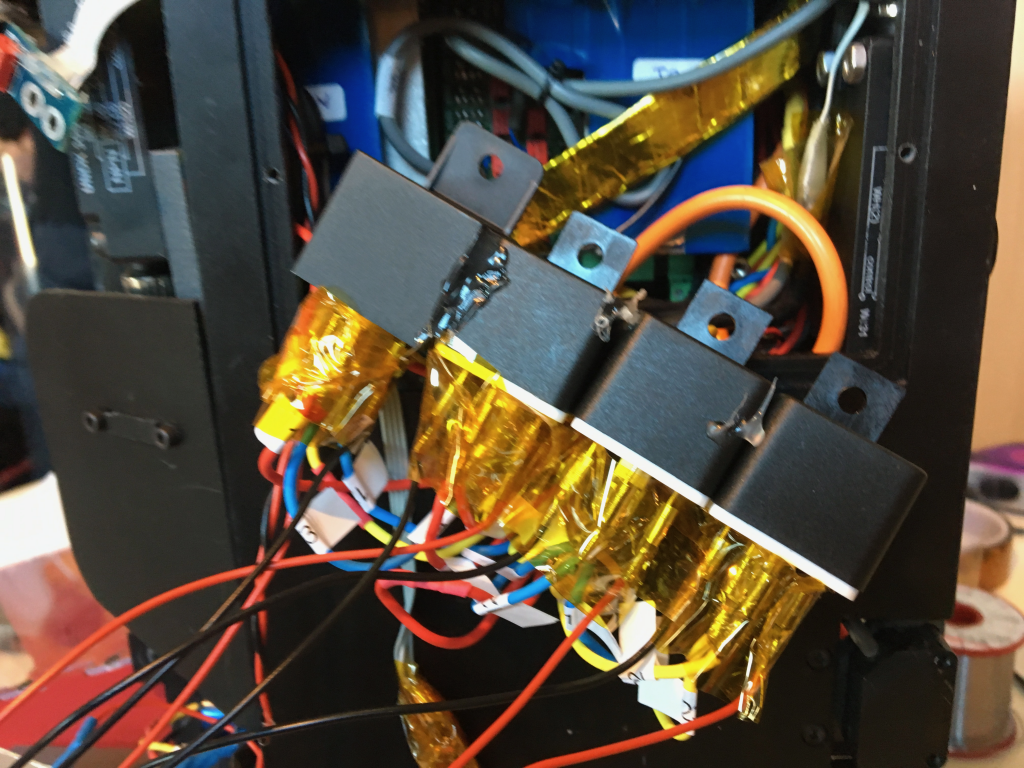
Cartes relais
Après une tentative d’utilisation infructueuse de driver de turbine inversable et par manque de temps, nous avons du utiliser des relais pour inverser le sens de rotation des turbines.
Ce n’est clairement pas la meilleur solution compte tenu du courant qui circule (2x turbines 22A).
Après quelques tests et quelques fumées, nous avons finalement utilisé des relais automobile afin d’inverser les phases de nos turbines.
baaaaaaaaa
Lidar
Cette année nous avons intégré notre LIDAR SICK TIM561 de balise directement dans notre robot2.
L’objectif était de faire des choix stratégiques en fonction de la position de l’adversaire.

TIM561 – SICK
Logiciel
Voici quelqu’un de nos logiciels.
Nucleus
Ce système maison (rien à voir avec l’OS) est une sorte de shell tournant sur nos Dspic. Il permet de contrôler l’ensemble des I/O de nos cartes, les réglages de l’asservissement, des automs,… depuis un PC/Mac. Il a été grandement amélioré et supporte à présent la communication via le wifi. Fini le robot qui se prend dans les câbles!
L’ensemble des logiciels présentés ci-dessous reposent sur Nucleus.
Nucleus Server
L’ensemble de nos logiciels fonctionnent tous en synergie à l’aide d’un serveur qui dispatch les informations souhaitées. Son role est de rediriger l’ensemble des données provenant des cartes électroniques vers les clients que nous allons vous présenter.
Interface avec Nucleus Server
AversiveConfigurator
Afin de faciliter les réglages de l’asservissement, nous avons développé une interface graphique permettant de visualiser l’ensemble des paramètres actuellement utilisés par le robot. Nous pouvons ainsi peaufiner les réglages de l’odométrie et de l’asservissement plus facilement.
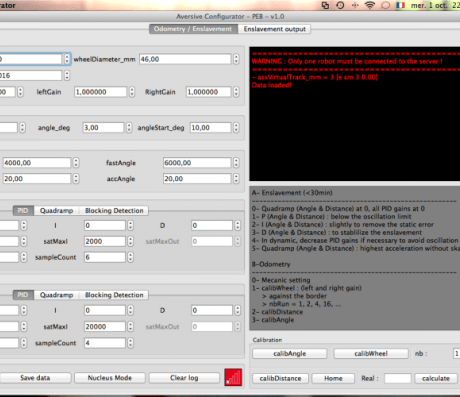
Ecran de réglages d’AversiveConfigurator
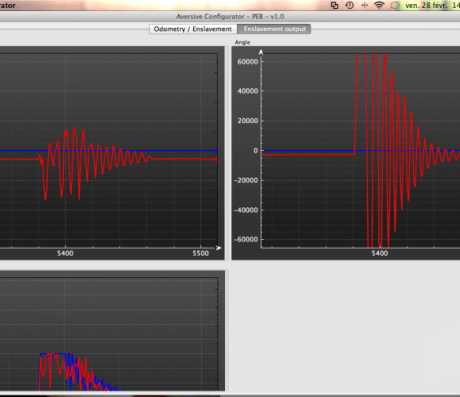
Ecran des courbes d’asservissement en live… là c’était avant les réglages^^
StrategyManagerGUI
Depuis trois ans maintenant, nos robots sont capables de choisir leur stratégie de façon dynamique, en fonction de plusieurs paramètres : priorité, temps de match, points, dépendance entre taches…
Afin de valider ce module, rien de mieux qu’une petite interface graphique bien évidement
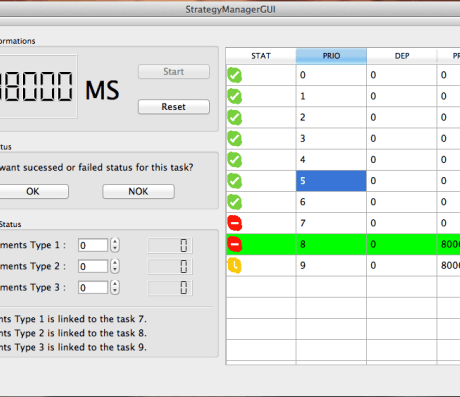
L’interface de validation
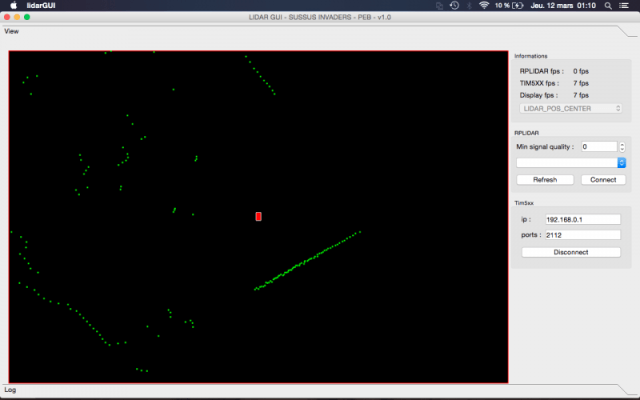
LidarGui
Afin d’avoir un retour graphique des acquisitions du Lidar, nous avons développé une application.