Robots 2018
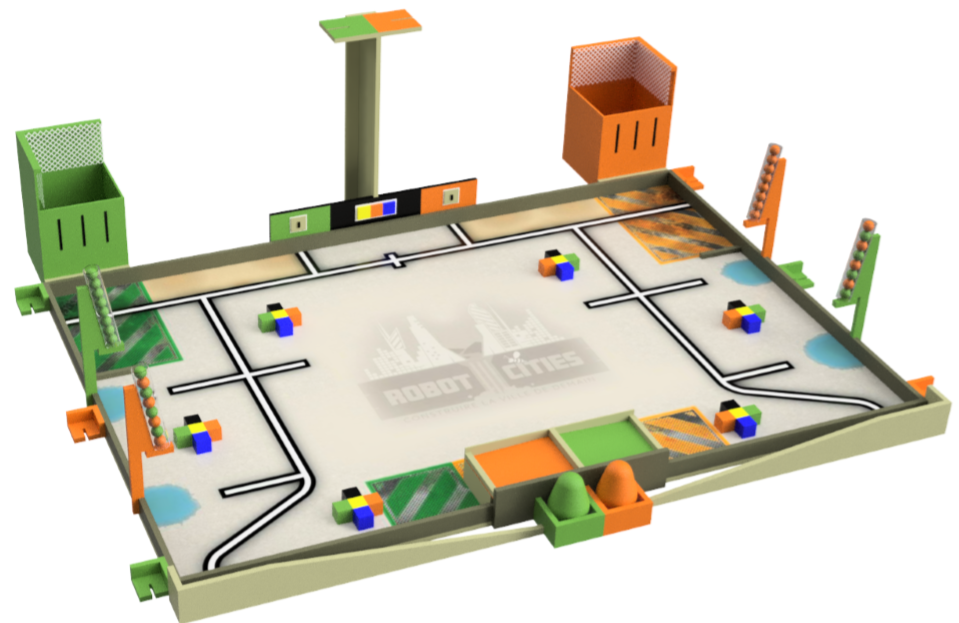
Règlement 2018 : Robot CitiesLe robot principal s’est occupé de la construction des bâtiments HQE tandis que le robot secondaire de la gestion de l’eau.

Mécanique
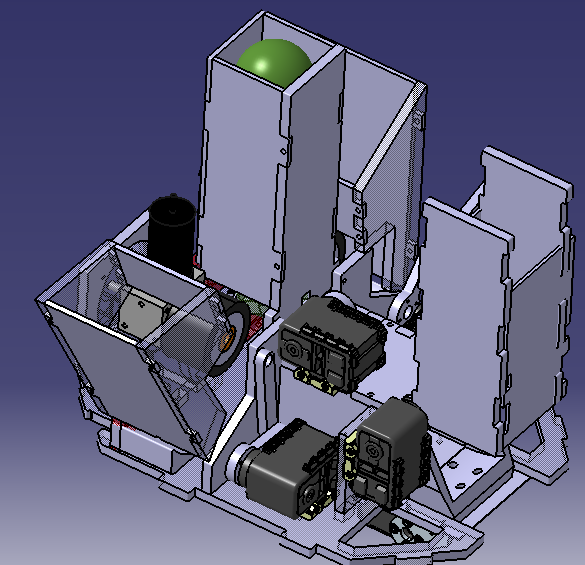
Voici des images de la modélisation du Robot principal :
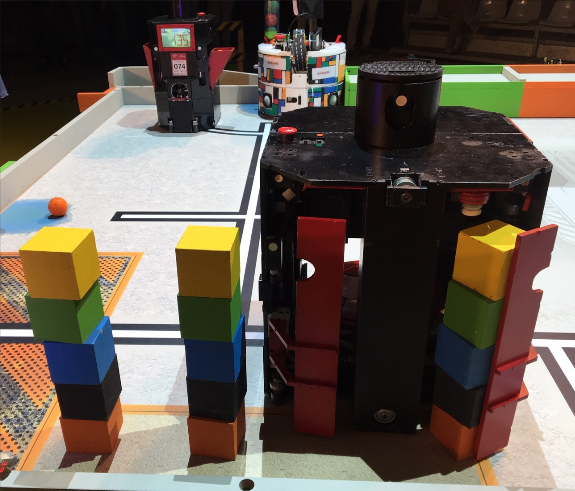
Le robot récupère avec un bras muni de 5 ventouses le tas de cubes puis les dispose sur le plateau tournant:
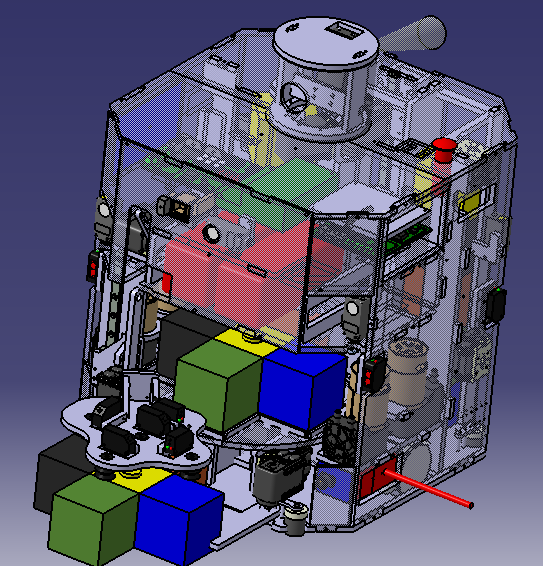
Vue de face
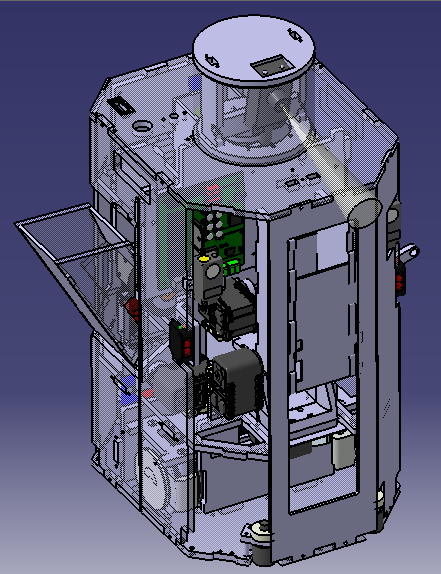
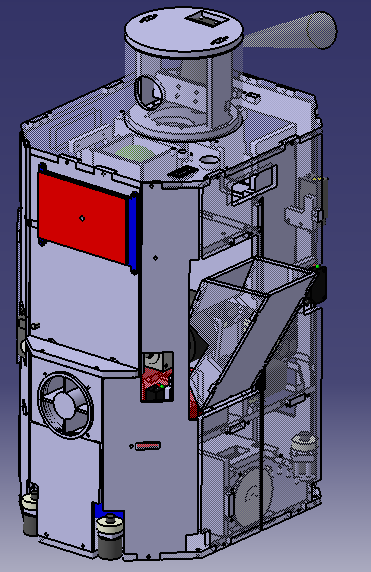
Ensuite un ascenseur construit les tours en respectant la combinaison détectée par la caméra de la balise fixe. Ainsi 2 tours peuvent être construites dans le robot:
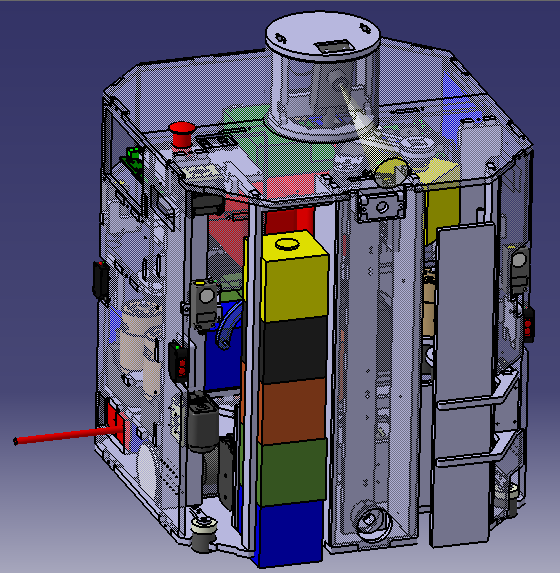
Vue arrière
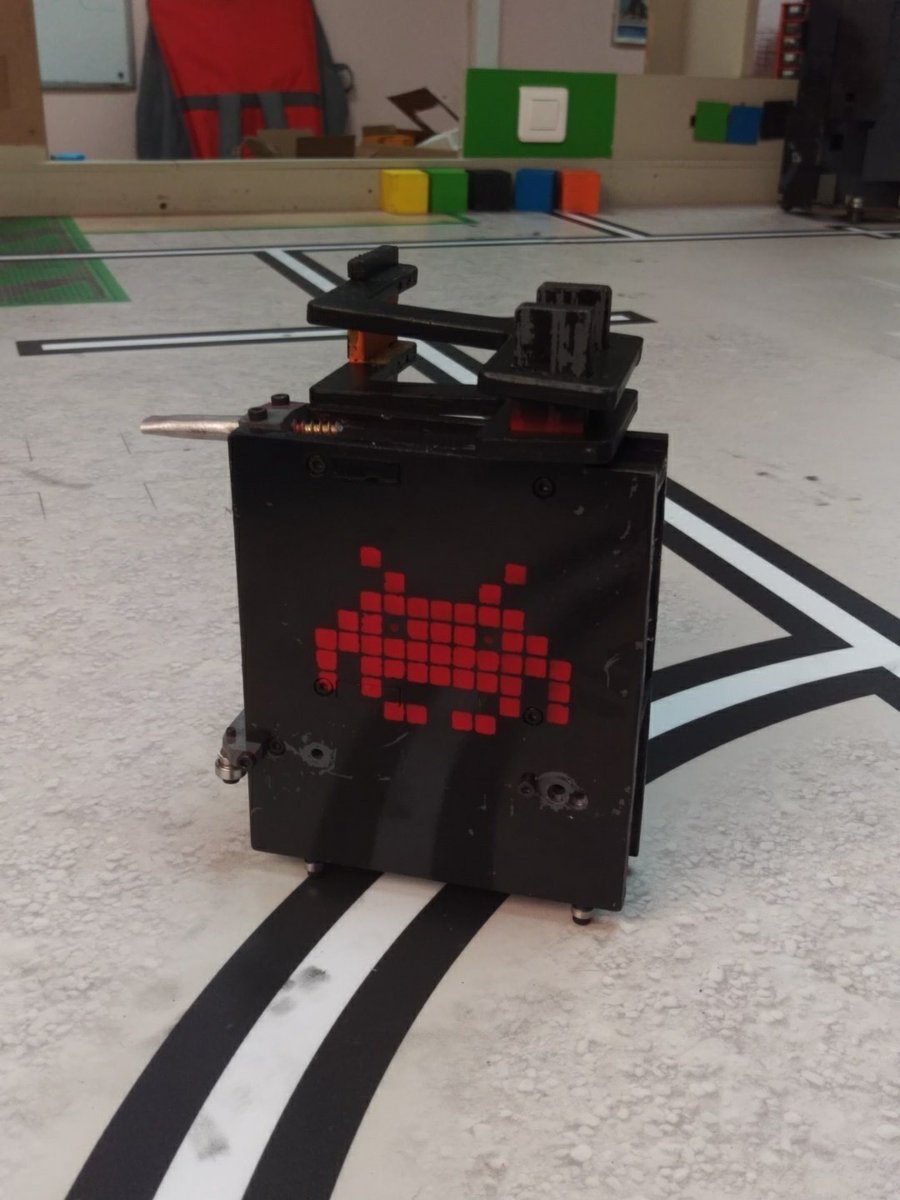
Le robot affichait l’estimation du score sur cet écran:

Vue de l’écran permettant l’affichage de l’estimation des points
Voici des images de la modélisation du robot secondaire:
Le robot récupère l’eau à l’aide de bacs qui s’ouvrent sur les côté. En avançant sur le réservoir le bac ouvre le réservoir et le vide. Les balles sont triées puis stockées.
Vue de face
Vue de côté
Système de trie/tire/stockage de l’eau
Arrière
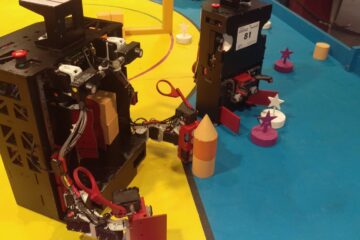
Abeille:
l’abeille était activée par le robot secondaire. Elle se composait de roulement à billes et d’une point pour butiner la fleur.
La balise fixe:
La balise fixe se compose d’un Lidar et d’une caméra. Les informations sont envoyées aux robots à l’aide d’un réseau Wifi.
La caméra permettait de détecter la combinaison du bâtiment HQE.
Le Lidar permettait de détecter la position des robots adverses.

Électronique
Par manque de moyens nous n’avons pas été en mesure de produire nos nouvelles cartes malgré l’aide de nos sponsors.
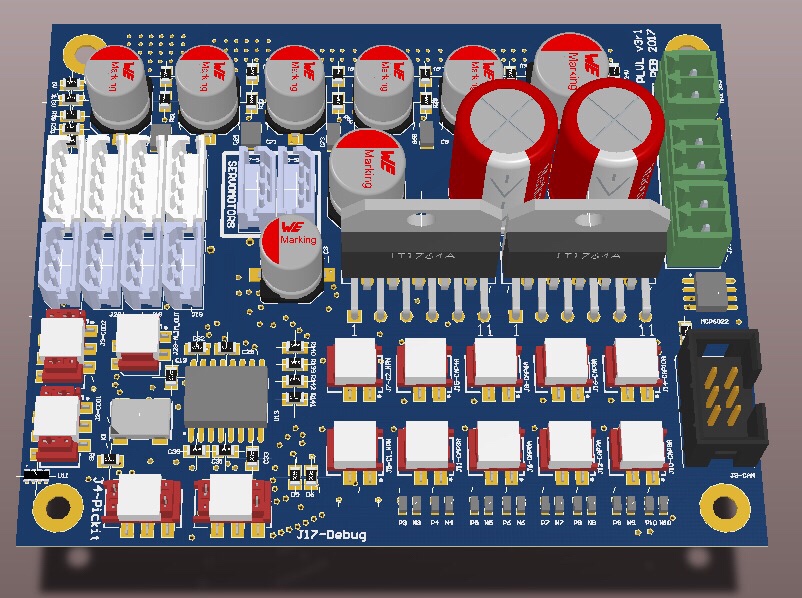
PLVL3
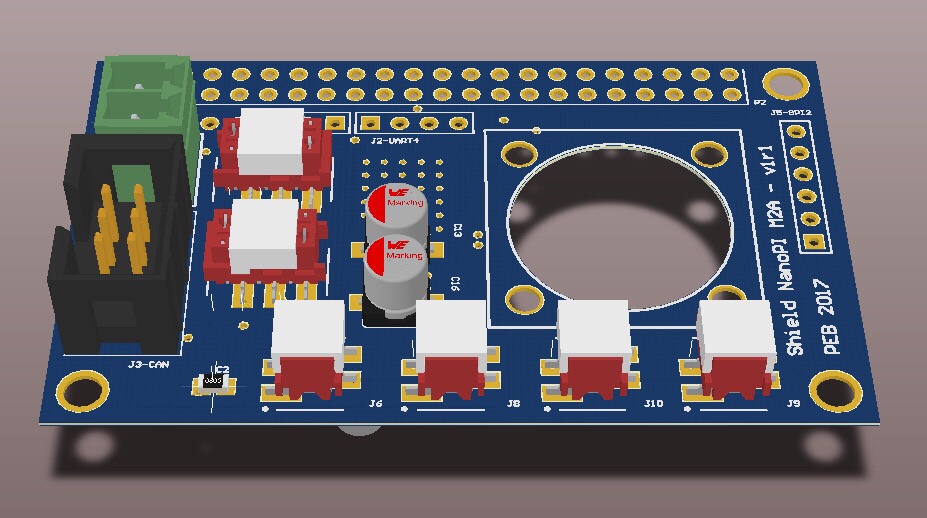
Shield NanoPI nano

Merci à Würth Elektronik !
Par ailleurs la difficulté d’approvisionnement de composants étant toujours aussi importante alors que la coupe 2019 prend forme, nous avons décidé de jouer la sécurité en repoussant leur première utilisation pour la coupe 2020.
Ainsi le robot 1 était équipé deux cartes PLVL2 et d’une carte Moteur alors que le robot 2 était équipé deux cartes PLVL2. La stratégie tournait sur des cartes NanoPi M2A (avec un écran pour l’affichage du score et ceci dans les deux robots) offertes par notre sponsor FriendlyARM.
Pour plus d’informations sur l’électronique de nos robots, se référer à la page 2017.
La seule nouveauté aura été la caméra permettant de faire les combinaisons. La caméra était présente dans la balise, controlée via une carte NanoPi de chez FriendlyARM. Le robot 1 recevait ainsi la combinaison via le réseau wifi de la balise :
Détection des couleurs
combinaison possible grâce à la caméra de la balise
Videos
Aucune vidéo pour 2018.