Robots 2011
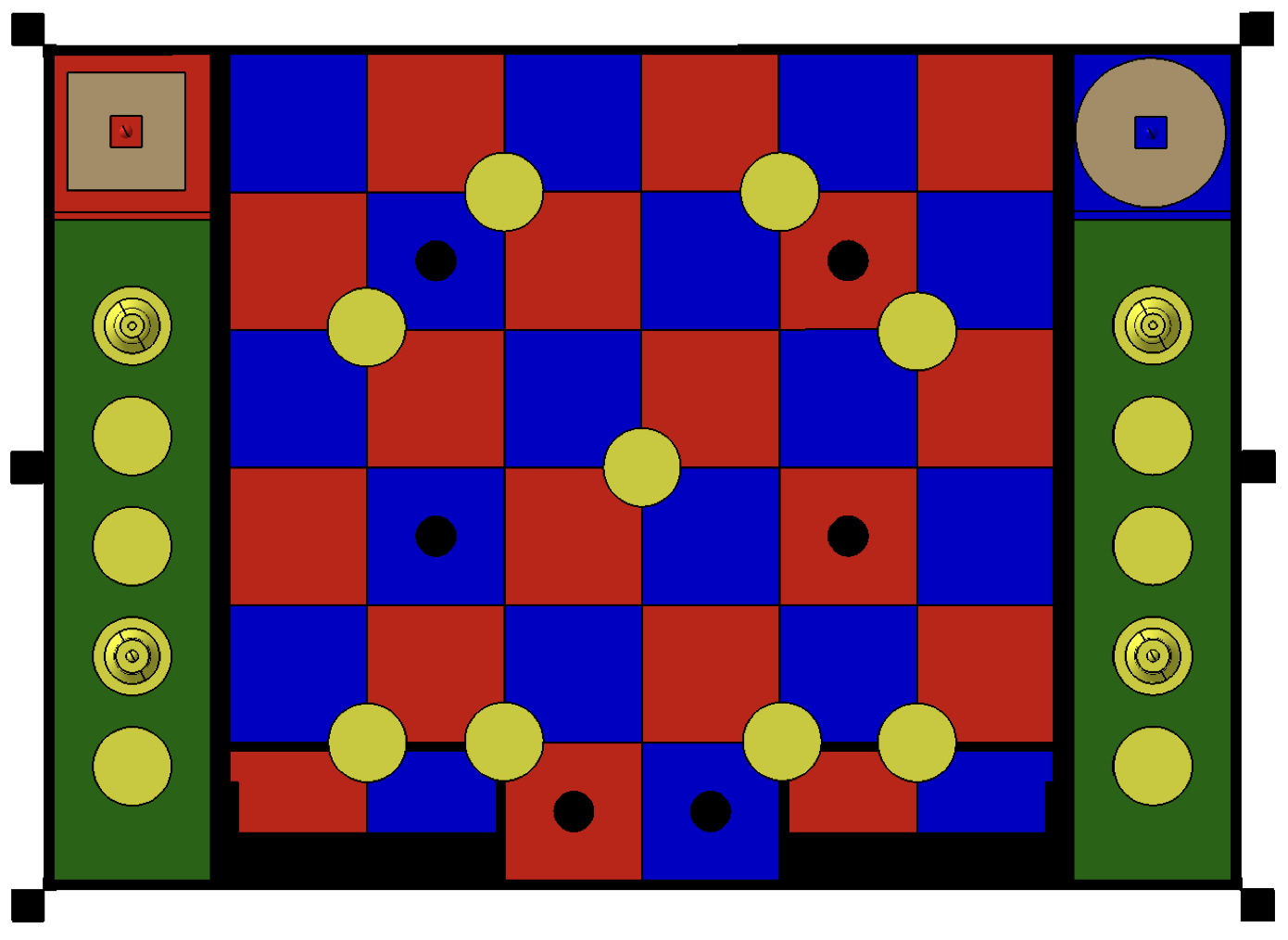
Règlement 2011 : Chess’Up2011 fut notre première participation à la coupe de France de robotique en tant qu’indépendants. Nous sommes donc partis de zéro cette année, que ce soit pour l’électronique, le logiciel ou la mécanique.
Mécanique
Première étape, la modélisation 3D sous CATIA v5 :
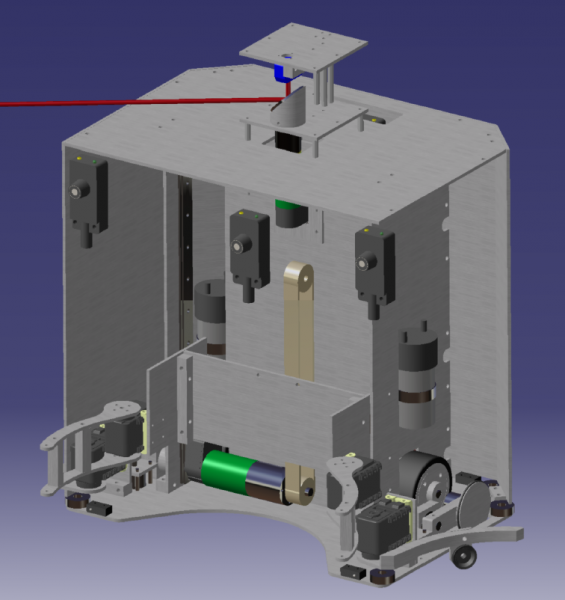
Le principe de base était d’avoir un ascenseur avec la possibilité de prendre 3 pions d’un seul coup à l’aide de bras munis de ventouses. Par manque de temps nous avons mis en place uniquement l’ascenseur qui s’est révélé d’une efficacité redoutable.
La base roulante avait comme moteur propulsion des Faulhaber 3042 (20 watts) avec un réducteur de rapport 1:43. Les roues motrices étaient constituées d’une jante en alu et des pneus Medial Pro. Ainsi la vitesse théorique du robot était de 0.43 m/s (ce qui est assez lent).
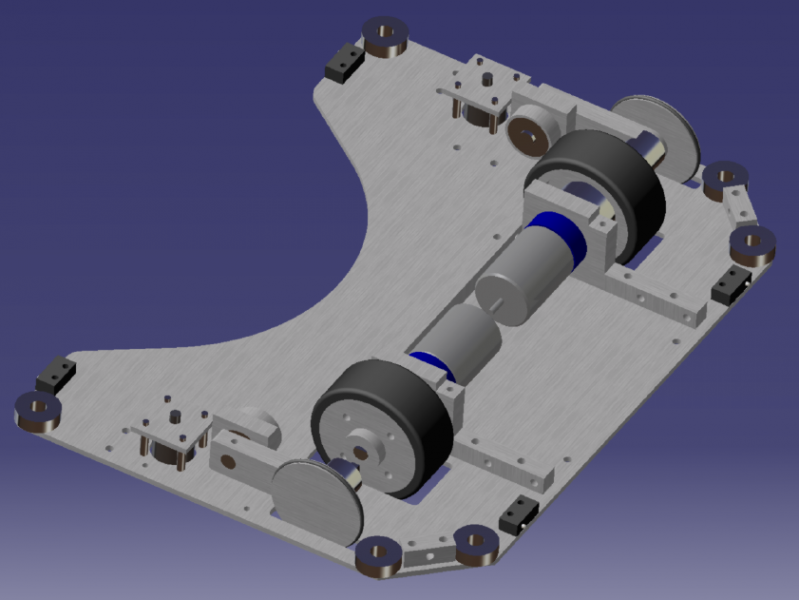
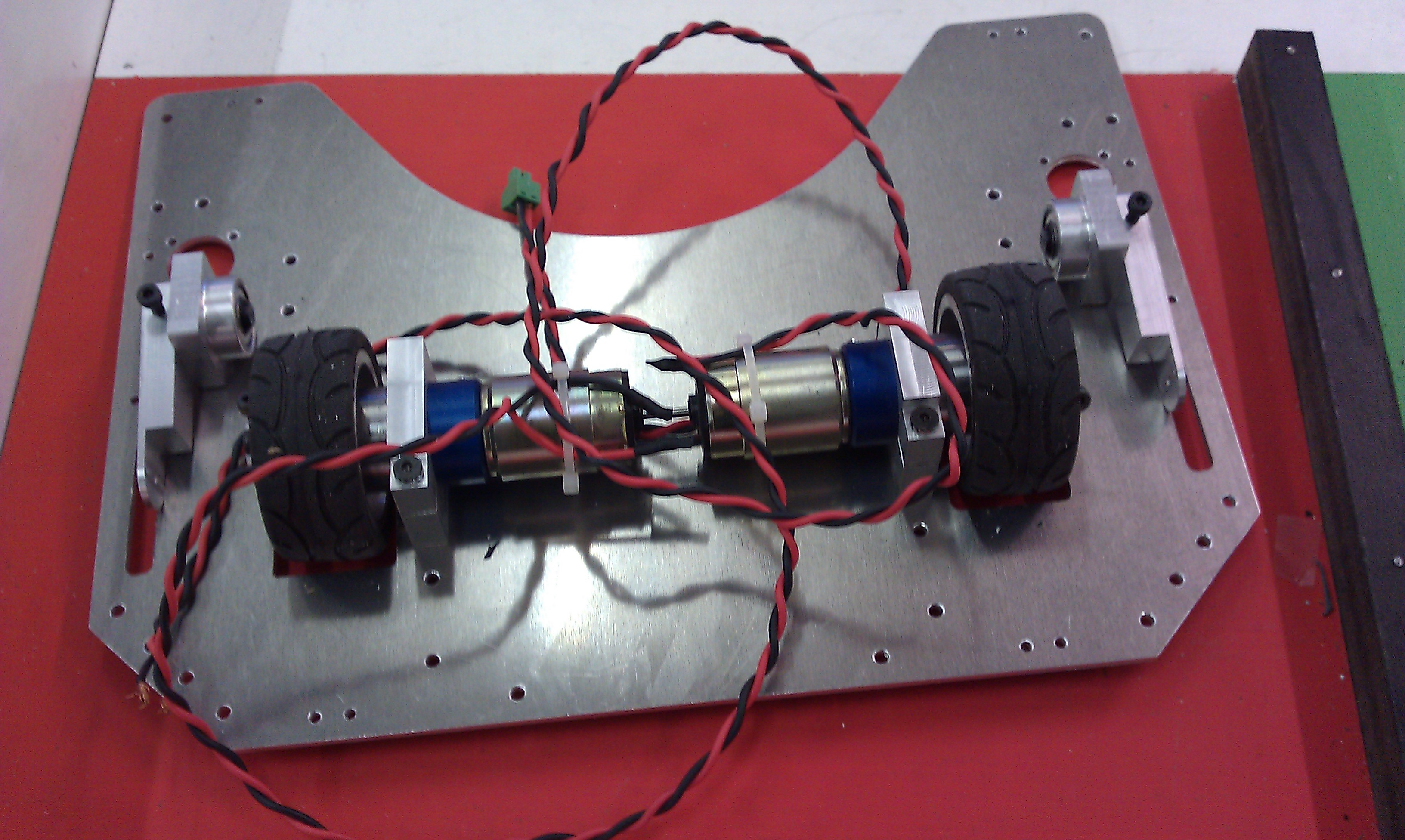
Il faut retenir que les moteurs propulsions sont en alignement avec les roues codeuses sur pivot. L’avantage de cette technique est que le glissement transversal du robot lors de rotation ne provoque pas trop de perturbations sur l’odométrie du robot.
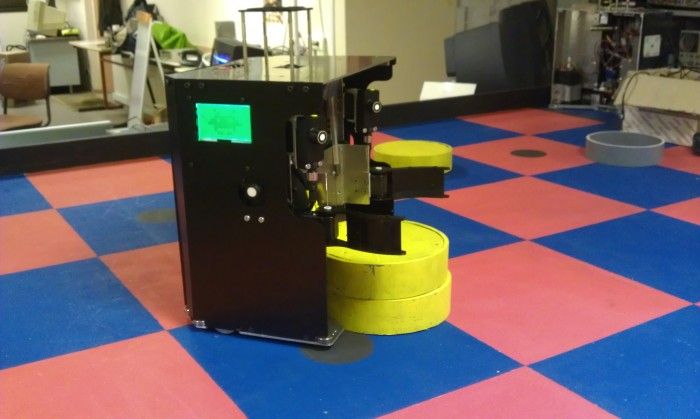
Concernant le système mécanique, le robot à juste une pince avec un ascenseur à base de servomoteur AX-12. Au départ nous voulions mettre un motoréducteur asservi en position, mais par manque de temps, nous avons choisi de mettre 2 AX-12 en série pour lever les pions.
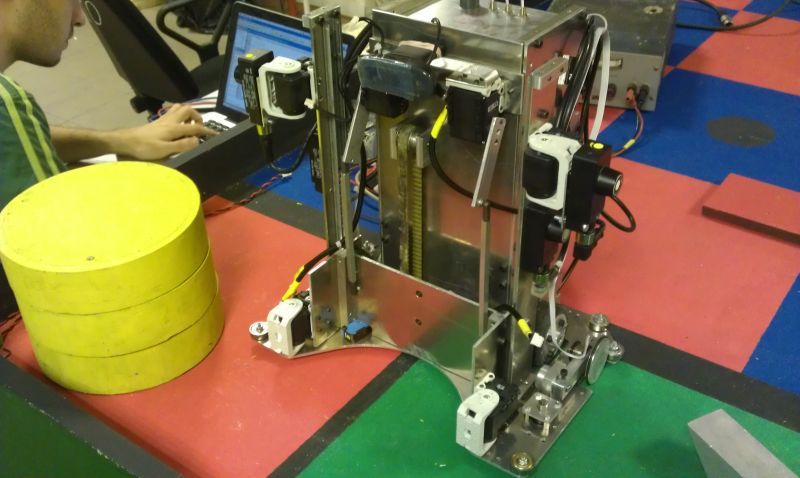
Côté capteurs nous utilisions seulement 2 capteurs ultrason UNDK30 pour la détection adversaire et deux autres de chaque côté du robot pour détecter les rois et les reines.
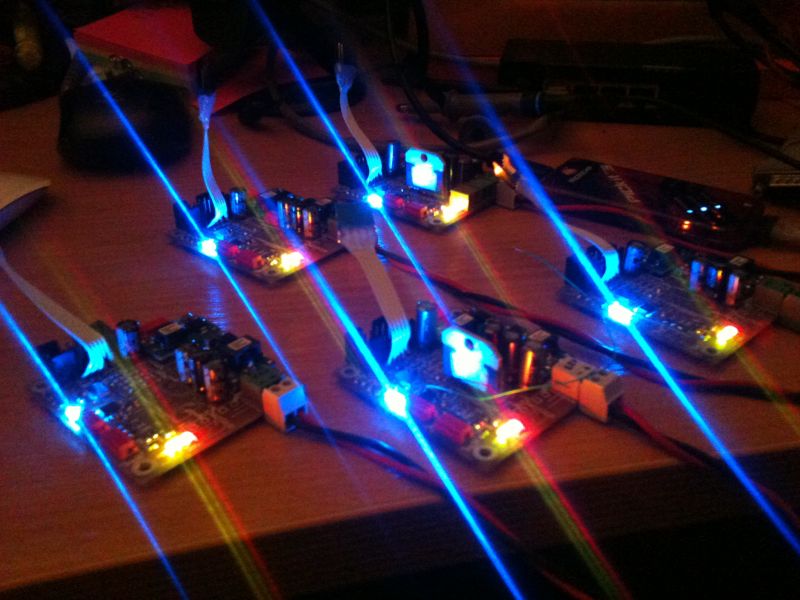
Électronique
Pour notre architecture électronique nous avons choisi de concevoir une carte multifonction que nous pourrions dupliquer en N exemplaires afin de répondre aux exigences de notre cahier des charges.
Les caractéristiques de cette carte (portant le nom de PLVLv1) étaient les suivantes :
- Dspic 33FJ256GP804 (cadencé à 80Mhz)
- 2 sorties moteurs
- 2 entrées codeurs
- 6 entrées capteurs
- 3 connecteurs pour brancher des AX12
- 1 sortie PWM directe
- 1 liaison uart pour le debug
- 1 bus I2C

Nous avons aussi développé des cartes Balise nous permettant de connaître la position de l’adversaire grâce à un système de triangulation. Cependant par manque de temps nous n’avons pas eu le temps de finir la mise en place de ce système.