Robots 2012
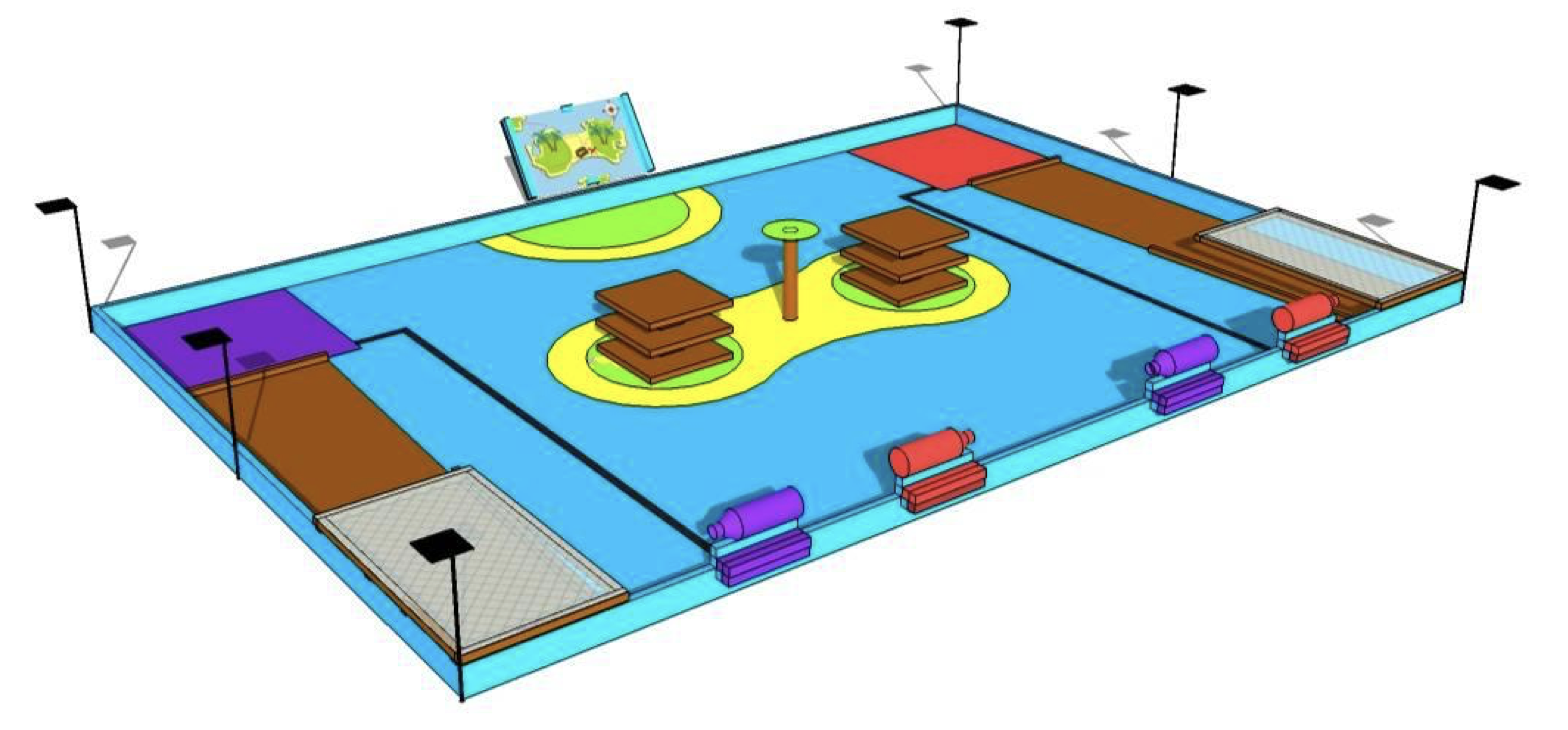
Règlement 2012 : Treasure Island2012 fut notre seconde participation à la coupe de France de robotique en tant qu’indépendants. Nous sommes donc partis des bases de l’année 2011 pour réaliser les robots les plus compétitifs possible.
Mécanique
Cette année avait la particularité de permettre aux équipes d’avoir deux robots dont les périmètres étaient de 120cm pour le gros robot et 800cm pour le petit.

Robot secondaire
- 2 moteurs maxon pour la propulsion ( Amax32 11W + réducteur de 1:19) (roue 1/8 Medial PRO)
- 1 bras 5 axes + 2 ventouses
- 2 pompes à vide à piston
- 2 codeurs Scancon 3000 points
- 1 capteur US Baumer monté sur un AX12 pour la détection adversaire
- 6 capteurs IR Omron
- 1 porte
- 1 benne
- 12 AX12
Les plaques de PVC en 3mm se sont avérées pas suffisamment rigides pour avoir une structure propre pour le robot, pour l’année 2013 tout sera en PVC 6mm.
Les capteurs Omron (6ZP) en bas permettaient de lancer l’automatisme pour mettre les éléments de jeu dans la benne.
Après le 2ème match nous avons changé le bras avec les ventouses pour mettre une pinces pour prendre la carte (30 minutes de mécanique et 1 heure de modification de code) le résultat est concluant 30 minutes après lors du 3eme match. Le robot saisissait parfaitement la carte au trésor et nous assure 5 points :

Robot principal
Le robot est un enjambeur de palmier et de totem :
- 2 moteurs Faulhaber 3042 (20W + réducteur de 1:43) ( roue de 120mm de diamètre)
- 6 pompes à vide
- 10 AX12
- 3 capteurs US Baumer
- 4 capteurs IR Omron
Le principe est de s’arrêter au dessus du totem, sortir les 4 « »bras CD » » les descendre en aspirant puis les remonter. Enfin le robot avance doucement en aspirant les lingots et les maintient grâce à des fossiles. Le concept du robot est assez bluffant à la base mais dure à mettre au point.
Bien que le squelette soit en PVC de 6mm la structure en arche a bien fonctionné, le robot était précis dans ses déplacements.
Les 6 pompes à vide ont nécessité la mise en place d’un dissipateur important sur les pont en H ( LMD18200).
La construction a malheureusement commencé en avril.
Le robot n’était pas terminé à la coupe de France, cependant il a fait quelques match lors de la coupe d’ile de France.
Bien que le robot soit compliqué on reste satisfait car il avait quand même la possibilité de faire de très gros score tout en embêtant l’adversaire.
S’il avait été au point le jour J, nous aurions pu aller très loin dans la compétition.
Électronique
Pour notre architecture électronique nous avons choisi de mettre deux cartes PLVL (cf: nos cartes de l’année dernière) reliées par un bus I2C dans chaque robot.
Les caractéristiques de cette carte étaient les suivantes :
- Dspic 33FJ256GP804 (cadencé à 80Mhz)
- 2 sorties moteur
- 2 entrées codeurs
- 6 entrées capteur
- 3 connecteurs pour brancher des AX12
- 1 sortie PWM directe
- 1 liaison uart pour le debug
- 1 bus I2C
Vidéos
Aucune vidéo pour 2012.