Sponsors
Règlement
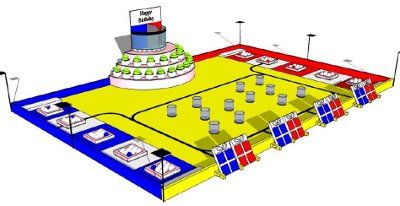
Règlement 2013 : Happy Birthday !
Mécanique
Pour suivre l’évolution des robots et les réactions de la communauté du site usinages.com c’est par ici
Le concept:
- Le robot secondaire apporte les assiettes au robot principal puis s’occupe des cadeaux et des bougies.
- Le robot principal s’occupe des verres et du tire des cerises
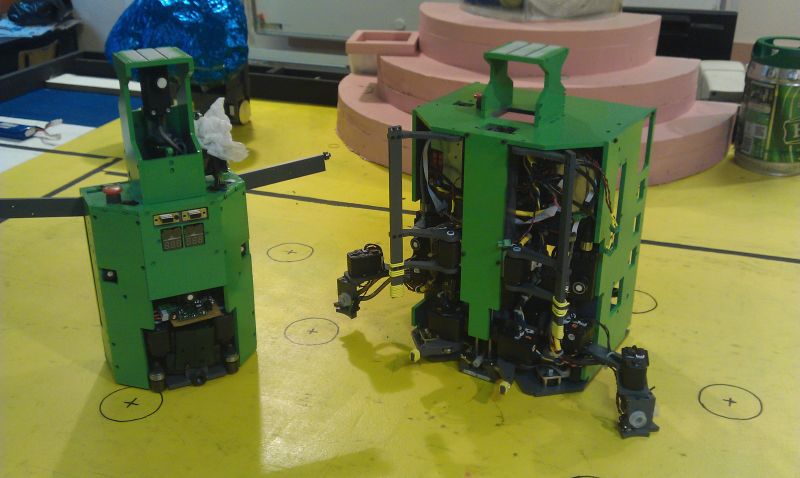
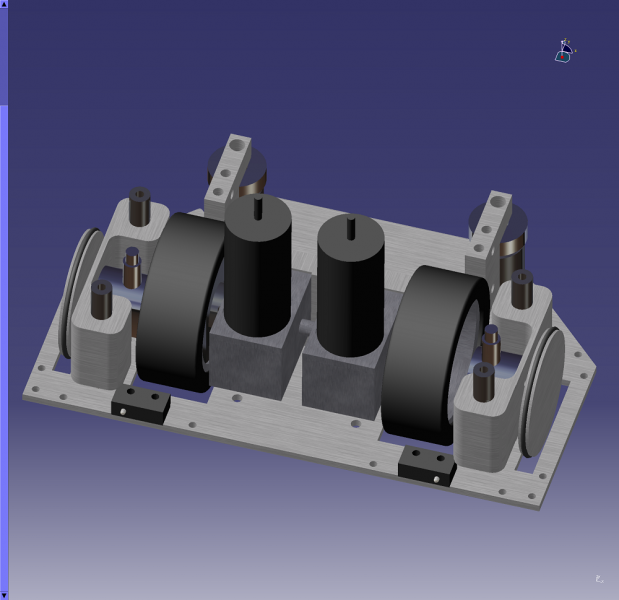
Le robot secondaire:
Ci dessous le modèle 3D sous CATIA V5 de la base roulante du robot secondaire:
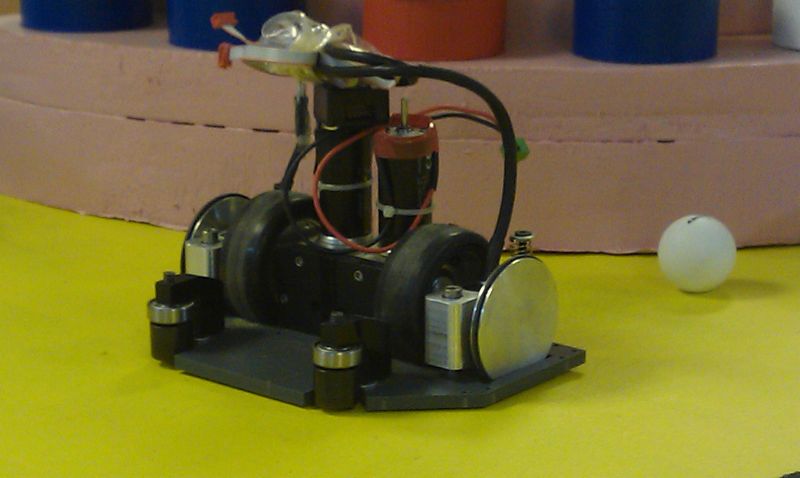
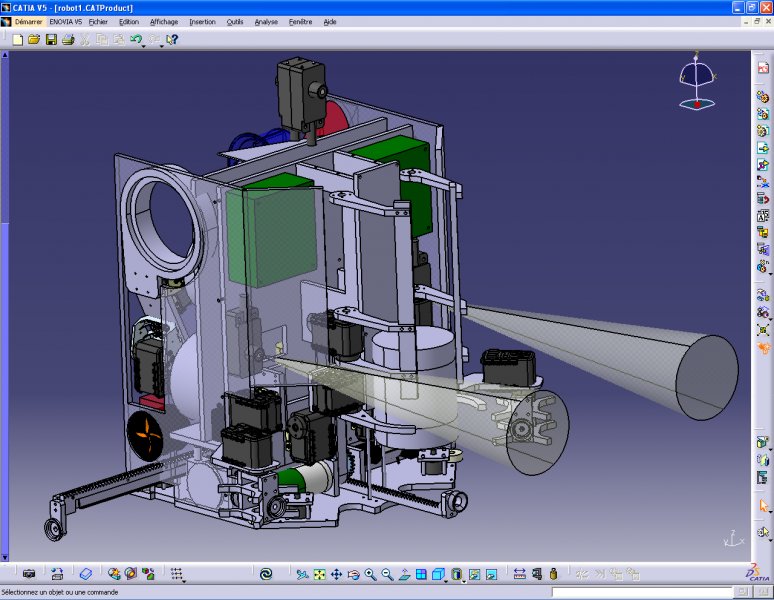
Le robot principal:
Ci dessou le modèl 3D su robot sous CAITAI V5:

Electronique
L’électronique du robot se compose de 2 cartes 80mm * 90mm.
La carte PLVL2 est une carte très polyvalente. Elle peut gérer des moteurs, des servo-moteurs (AX12), et des capteurs. Cette carte est le cerveau du robot et s’occupe de la stratégie et des automatismes.
La carte Moteurs est dédiée à la gestion de moteurs. Elle permet de commander les moteurs en vitesse ou faire des asservissements de position.
Composition de l’électronique du robot principal :
- 2 cartes PLVL2
- 1 carte Moteur
- 2 LIPO 14.8V en serie 4000mA/h 20C
- 1 LIPO 14.8V 45C pour la turbine
Composition de l’électronique du robot secondaire:
- 2 cartes PLVL2
- 2 LIPO 14.8V en serie 2200mA/h 20C
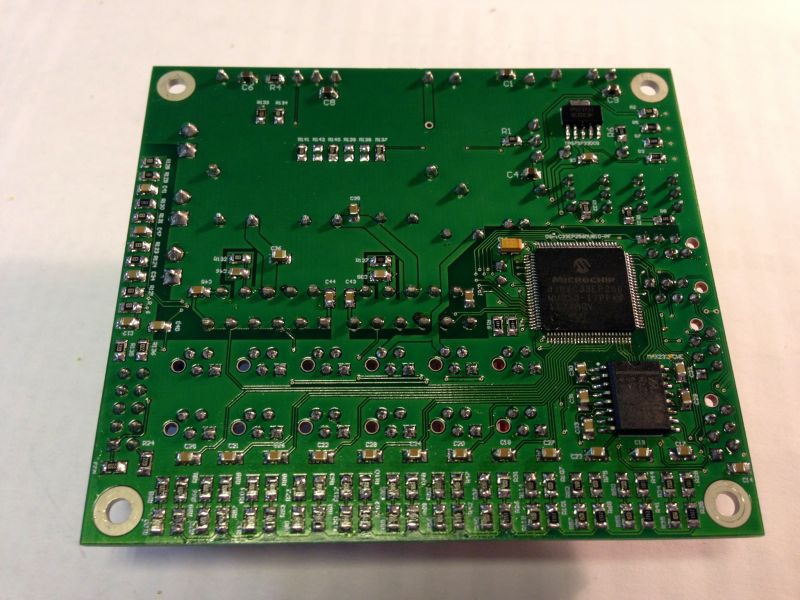
La carte PLVL2:
1 dspic 33E
2 LMD18200 + limitation de courant
1 chaine AX12
1 RS232
2 I²C
12 Capteurs (Analogique/Numérique)
2 codeurs incrémentaux
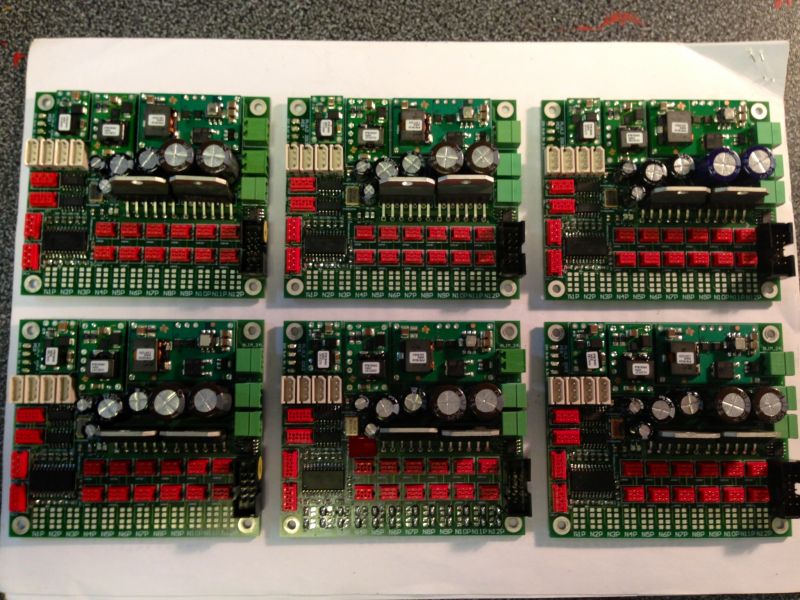
Les cartes PLVL2 terminées:
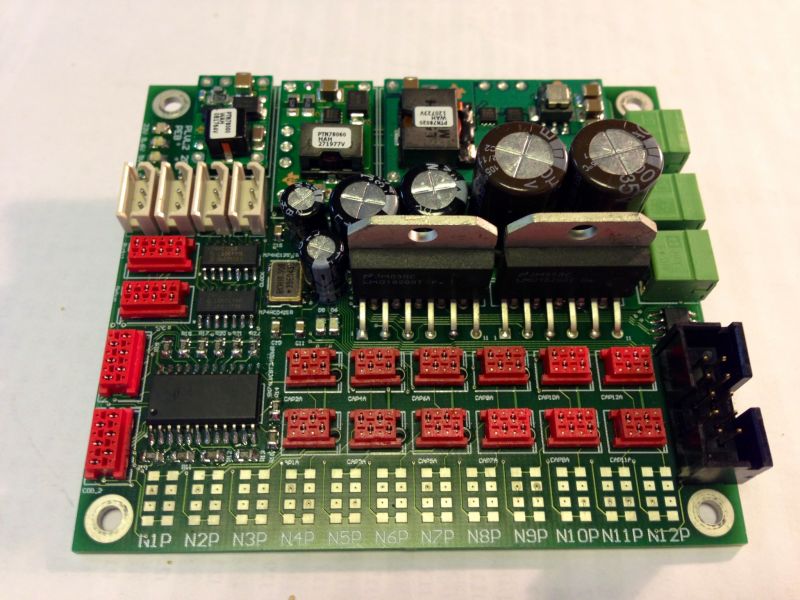

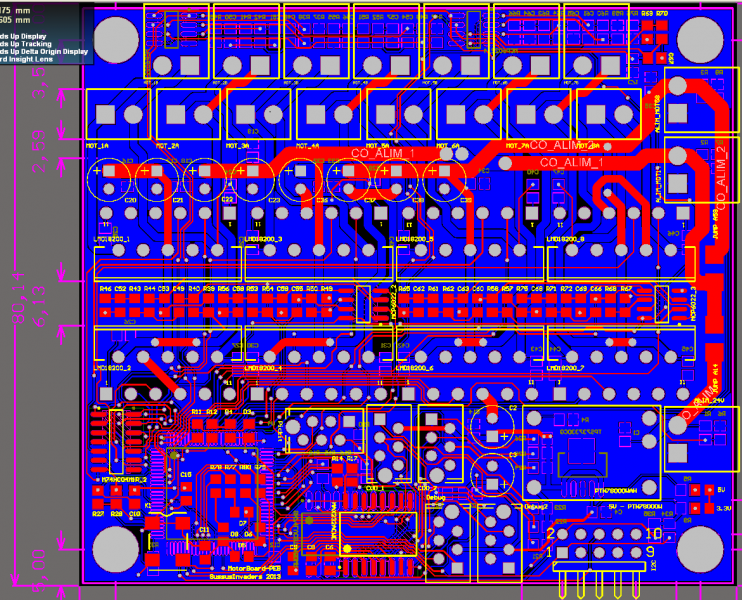
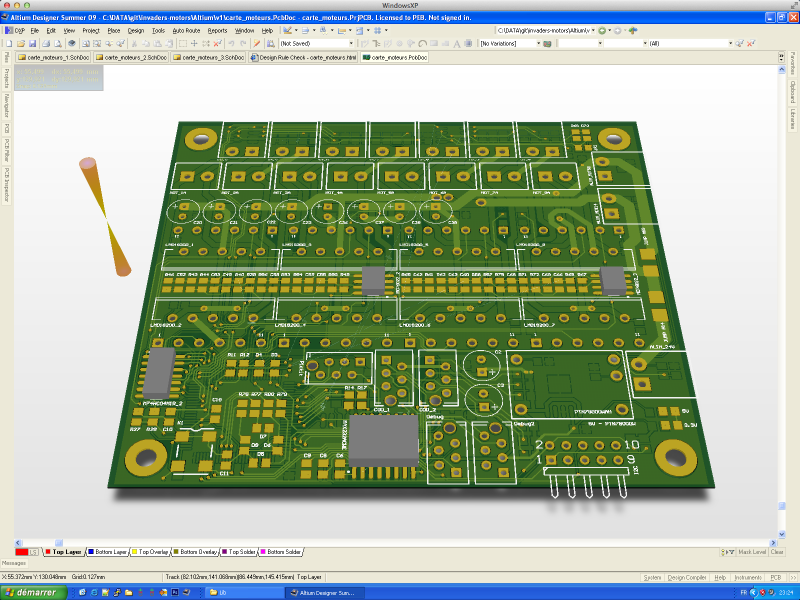
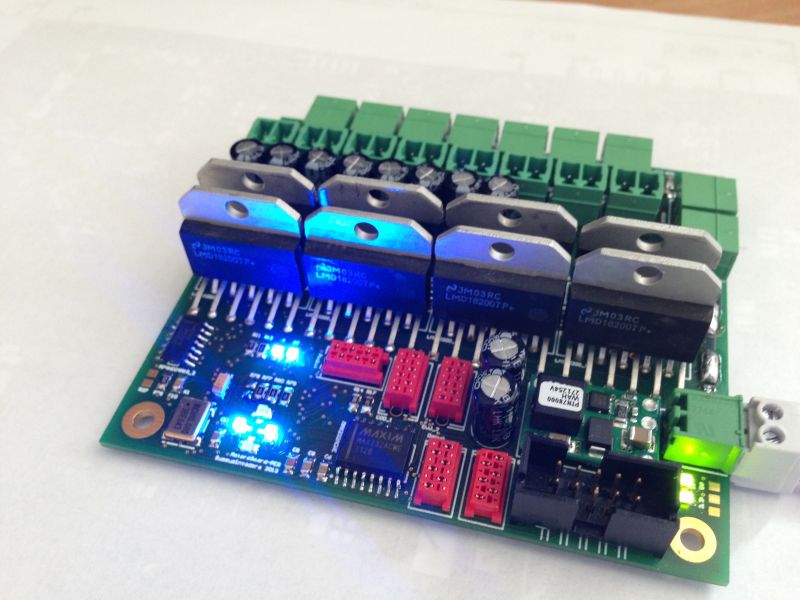
La carte Moteurs
1 dspic 33E
8 LMD18200 + limitation de courant
2 RS232
1 I²C
2 codeurs incrémentaux
La carte en fin de routage:
Photos
[peg-image src= »https://lh3.googleusercontent.com/-EuGTcBw7DlU/UmJg5gFZMSI/AAAAAAAAAmc/OFr0TLneo4AS7_jJ9TvYcpi4MSnaMla2ACHM/s144-o/IMG_1512.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413799809102114″ caption= » » type= »image » alt= »IMG_1512.jpg » image_size= »640×382″ ] [peg-image src= »https://lh3.googleusercontent.com/-e2Ci86FqC00/UmJg6fbbuNI/AAAAAAAAAZU/vJNM9nr_hqANQnAgZt6Ixc3fwyYKjPB2wCHM/s144-o/IMG_1511.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413816812976338″ caption= » » type= »image » alt= »IMG_1511.jpg » image_size= »2448×3264″ ] [peg-image src= »https://lh3.googleusercontent.com/-VpayJ8H78tM/UmJg49YjDNI/AAAAAAAAAZM/6ynrYa5ssnU6_VgNlPNyb9C4svilkCbWACHM/s144-o/IMG_1479.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413790494198994″ caption= » » type= »image » alt= »IMG_1479.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-5yxHmw2oE_g/UmJg43oTD7I/AAAAAAAAAZA/m5CSNpKz9Vgt9YzBVfXLD-OKhKCeXsX5wCHM/s144-o/IMG_1478.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413788949647282″ caption= » » type= »image » alt= »IMG_1478.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-m49Qw7aKl5g/UmJgzmdVocI/AAAAAAAAAbk/KIc0lW1CAbwnQpD-FX9P-sUhZGmeJPt8QCHM/s144-o/IMG_1472.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413698440929730″ caption= » » type= »image » alt= »IMG_1472.jpg » image_size= »573×960″ ] [peg-image src= »https://lh3.googleusercontent.com/-Z4o5kcPeTnU/UmJgzB23sXI/AAAAAAAAAbs/YpXlxAFbwRYP-3tMUYsDFaOOjjw-zZ41QCHM/s144-o/IMG_1471.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413688615907698″ caption= » » type= »image » alt= »IMG_1471.jpg » image_size= »573×960″ ] [peg-image src= »https://lh3.googleusercontent.com/-b9kM7RDMKVU/UmJgyrDY0yI/AAAAAAAAAcA/lwbApPdnymkJ1CjFsbtKIbiWMVm9WZGBgCHM/s144-o/IMG_1468.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413682494395170″ caption= » » type= »image » alt= »IMG_1468.jpg » image_size= »573×960″ ] [peg-image src= »https://lh3.googleusercontent.com/-tyOAnpXAd70/UmJgyOzuZaI/AAAAAAAAAcM/PF1JOhT3OiYKnBpzTSmP5QabIpLB8bXVQCHM/s144-o/IMG_1467.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413674912507298″ caption= » » type= »image » alt= »IMG_1467.jpg » image_size= »573×960″ ] [peg-image src= »https://lh3.googleusercontent.com/-jEQaKsGPpLg/UmJgxFF1xII/AAAAAAAAAcQ/bsfE4NBM2Xs4wuuiFKoeJe9wdqqHCe3GQCHM/s144-o/IMG_1466.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413655124264066″ caption= » » type= »image » alt= »IMG_1466.jpg » image_size= »573×960″ ] [peg-image src= »https://lh3.googleusercontent.com/-EHnWj5hNADA/UmJgzaQIqrI/AAAAAAAAAZo/C2LNYmrXL3kq7z2NzSZ_xcE-HYEfqy5DwCHM/s144-o/IMG_1454.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413695164328626″ caption= » » type= »image » alt= »IMG_1454.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-JEEh9XFdxF4/UmJgxBLukWI/AAAAAAAAAZk/8lskrnR9HPw6a5j4tJf-y0rop8AFGNQYwCHM/s144-o/IMG_1453.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413654075216226″ caption= » » type= »image » alt= »IMG_1453.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-flTblFn2Tgc/UmJgv5JhY8I/AAAAAAAAAX4/p0Doq5r-qOUakeGOgV8S6KMZYcmiNYNYQCHM/s144-o/IMG_1447.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413634738611138″ caption= » » type= »image » alt= »IMG_1447.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-BRAx3IRJaeI/UmJguE102eI/AAAAAAAAAXs/MCelKkCseSIeqmLH6SSo8KpPfudqmwyrACHM/s144-o/IMG_1439.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413603517487586″ caption= » » type= »image » alt= »IMG_1439.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-Tf5Nk-cJXqY/UmJgqdewEiI/AAAAAAAAAXc/VCxCKV3eudQfeXoUYuONIsZLZfDWe5p8QCHM/s144-o/IMG_1432.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413541412114978″ caption= » » type= »image » alt= »IMG_1432.jpg » image_size= »2448×3264″ ] [peg-image src= »https://lh3.googleusercontent.com/-E_O7daOmzDs/UmJgrHly7QI/AAAAAAAAAXg/lVRrwN1P6I03NPFSeusHyB8JoGsV1tYpgCHM/s144-o/IMG_1426.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413552715951362″ caption= » » type= »image » alt= »IMG_1426.jpg » image_size= »2448×3264″ ] [peg-image src= »https://lh3.googleusercontent.com/-MfeBlUn_1js/UmJgocOVoqI/AAAAAAAAAXQ/MoQpR-RRG1858M6K3BcWdMYqwnINZIi3QCHM/s144-o/IMG_1425.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413506715099810″ caption= » » type= »image » alt= »IMG_1425.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-LKgnp3LFXLg/UmJgknkZJgI/AAAAAAAAAXA/VnpQC3n2k0sMh1ma0JpOGEYzPPmanByxQCHM/s144-o/IMG_1416.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413441040918018″ caption= » » type= »image » alt= »IMG_1416.jpg » image_size= »2383×2442″ ] [peg-image src= »https://lh3.googleusercontent.com/-Hg2JrH767hk/UmJglLtEAxI/AAAAAAAAAXI/jXqpwuMJscQ6448pRe09wu-MgI26n0PVQCHM/s144-o/IMG_1412.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413450740957970″ caption= » » type= »image » alt= »IMG_1412.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-GP-LPHXXkMs/UmJglFSojaI/AAAAAAAAAXE/n9EFu9NrbLAPohniEatoD0s_Nde1CDIhgCHM/s144-o/IMG_1411.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413449019493794″ caption= » » type= »image » alt= »IMG_1411.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-bL2l02VRrfg/UmJgfZPfTdI/AAAAAAAAAWw/PaQZzyGmUy4_1-yP0GZE0EEokswv0GSdQCHM/s144-o/IMG_1407.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413351295798738″ caption= » » type= »image » alt= »IMG_1407.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-ICTd7JL-4tk/UmJgeL57ZcI/AAAAAAAAAWs/oudf-FuwywwevlgpuxsaJkwfUBzb5_xEgCHM/s144-o/IMG_1406.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413330535835074″ caption= » » type= »image » alt= »IMG_1406.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-JBSGtEXiJbc/UmJgaaF_-AI/AAAAAAAAAWc/i4q_Js5XslQArLzdOWhOLLMjiIsGPv_zwCHM/s144-o/IMG_1362.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413265625085954″ caption= » » type= »image » alt= »IMG_1362.jpg » image_size= »2448×3264″ ] [peg-image src= »https://lh3.googleusercontent.com/-SU5OpJO90MU/UmJgV503qQI/AAAAAAAAAm0/CrzuCmmjiZYTf_ncZe5pwuEZIvoJ7nhBwCHM/s144-o/IMG_1328.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413188243826946″ caption= » » type= »image » alt= »IMG_1328.jpg » image_size= »640×382″ ] [peg-image src= »https://lh3.googleusercontent.com/-66PA1win-bA/UmJgVXiWqrI/AAAAAAAAAmo/OG2ZD-6lTm8ayXcZJsDKIKKvZY2nAsfbQCHM/s144-o/IMG_1264.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413179039361714″ caption= » » type= »image » alt= »IMG_1264.jpg » image_size= »640×382″ ] [peg-image src= »https://lh3.googleusercontent.com/-qaYUGp8FhPI/UmJgVHXxB5I/AAAAAAAAAms/JbHkTocZBgk_EFkS_9s8LdlXMSgOpTgcACHM/s144-o/IMG_1263.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413174699984786″ caption= » » type= »image » alt= »IMG_1263.jpg » image_size= »640×382″ ] [peg-image src= »https://lh3.googleusercontent.com/-vmsSDseKy3I/UmJgbjN5JAI/AAAAAAAAAWg/q2F84NAcaPcA6dnyUYT5THkdUf4FxkrygCHM/s144-o/IMG_1259.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413285253981186″ caption= » » type= »image » alt= »IMG_1259.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-npB9MUNGMrc/UmJgUtz3HeI/AAAAAAAAAWM/0-N2fdWnaqcwwH7NGKcPzPIEu3XmQRirwCHM/s144-o/IMG_1258.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413167838502370″ caption= » » type= »image » alt= »IMG_1258.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-766FTT-6t6E/UmJgSDDR3ZI/AAAAAAAAAVk/upBuswu7pGMkpDUyiwGByZz-UV8wBeklwCHM/s144-o/IMG_1256.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413122000706962″ caption= » » type= »image » alt= »IMG_1256.jpg » image_size= »3264×2448″ ] [peg-image src= »https://lh3.googleusercontent.com/-60VPkFohYg0/UmJgSoM0LSI/AAAAAAAAAZY/8USpAb-iNU8IVHtloltSpasBjsTE9uPtACHM/s144-o/IMG_1156.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413131972816162″ caption= » » type= »image » alt= »IMG_1156.jpg » image_size= »2048×1536″ ] [peg-image src= »https://lh3.googleusercontent.com/-JAFLKf2Cn2E/UmJgSlfVUGI/AAAAAAAAAZI/P96P-a0CbAUupB3Z_8APZzl4agmCMIp0wCHM/s144-o/IMG_1155.jpg » href= »https://picasaweb.google.com/104898692694141753090/Robot_2013#5936413131245178978″ caption= » » type= »image » alt= »IMG_1155.jpg » image_size= »2048×1536″ ]