Robots 2014

Règlement 2014 : PrehistobotMécanique
Au vu de la grande complexité du thème 2014, nous avons décidé de proposer deux robots afin de faire toutes les actions possibles.
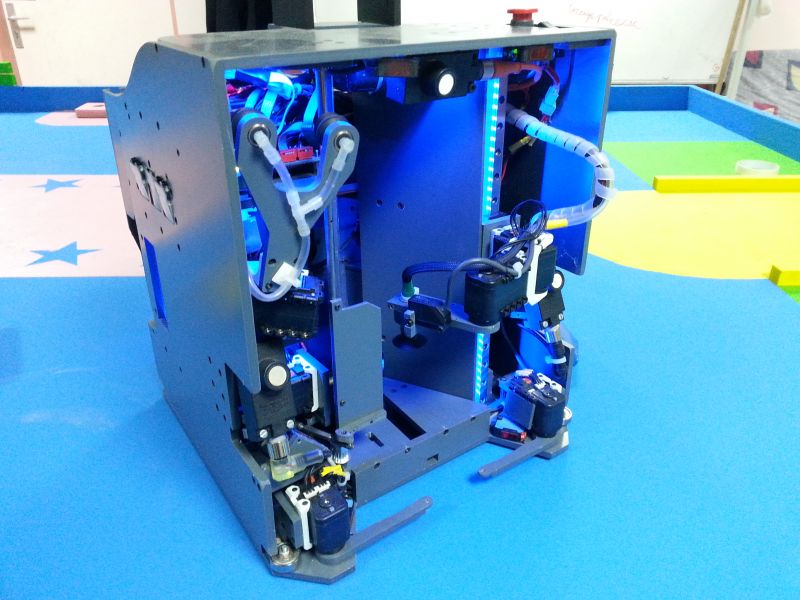
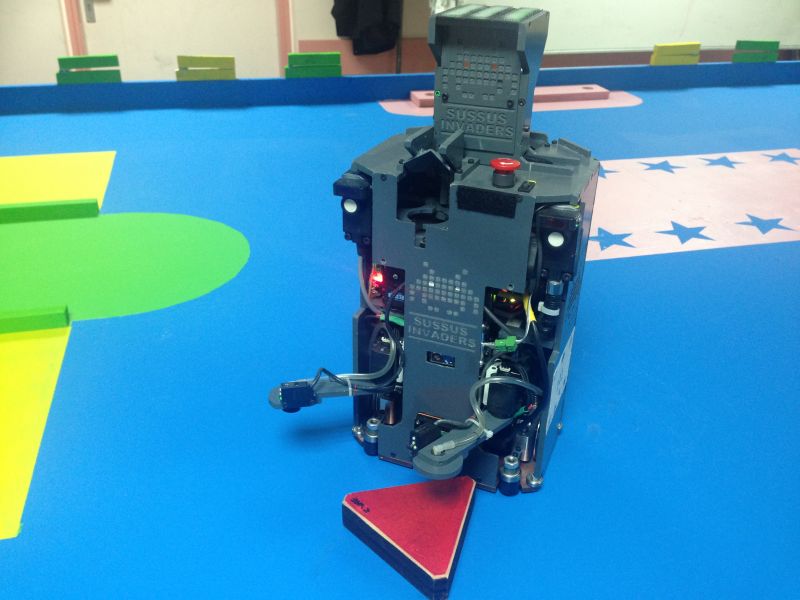
Présentation du robot principal :
Le gros robot s’occupe des feux et des fruitmouths.
Le système feux se compose de 4 sous-systèmes.
- Le système récupération des feux muni de 2 AX12.
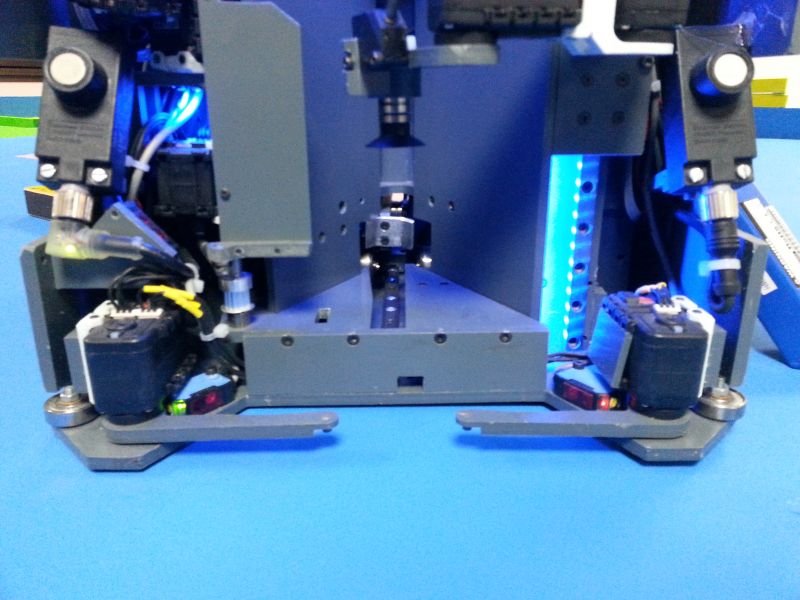
- Le robot comprend un ascenseur asservi en position. Le bras sur l’ascenseur se compose de 2 AX12 et utilise une ventouse pour manipuler les feux.

- Un système de retournement se compose de 2 AX12 muni de 2 ventouses pour maintenir le feu lors du retournement.
- Le robot peut stocker 6 feux retenus par une porte motorisée avec un AX12. Pour être plus rapide l’évacuation des feux se fait à l’aide d’un motoréducteur asservi en position qui pousse les feux les uns après les autres sur la zone bonus.
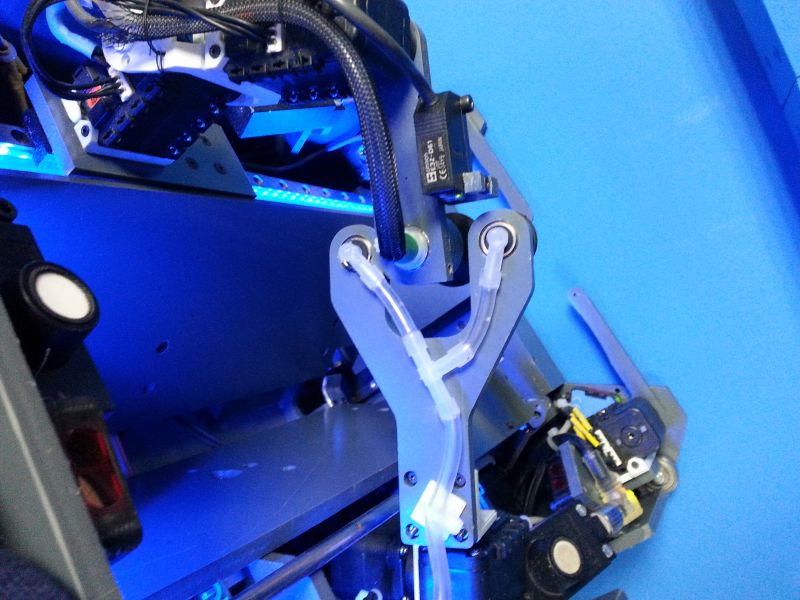
Le système fruitmouths situé à l’arrière du robot se compose de 3 sous-systèmes:
- Le robot possède une grosse griffe pivotante qui tourne à l’aide d’un motoréducteur de rapport 132:1 asservi en position. Pour récupérer les fruitmouths le robot baisse sa double griffe, puis recule, remonte la griffe et avance de nouveau pour faire tomber deux fruitmouths. il recommence l’opération 2 fois pour vider un arbre.

- Une fois décroché, les fruitmouths sont aspirés dans 2 barillets (2x AX12) à l’aide de 2 turbines. Le barillet permet de détecter la couleur du fruitmouth et un stockage optimal.

- L’évacuation des fruitmouths dans le barillet se fait latéralement à l’aide de petites portes grâce à 2 AX12. les fruitmouths tombent sur deux petits tapis roulant.

Fiche technique:
- 2 motoréducteurs propulsions (Faulhaber 2842 et réducteur 23/1 14:1)
- 4 motoréducteurs asservi en position
- 11 servomoteurs AX12
- 2 pompes à vide
- 2 turbines
- 2 motoréducteurs en commande directe
- 12 capteurs
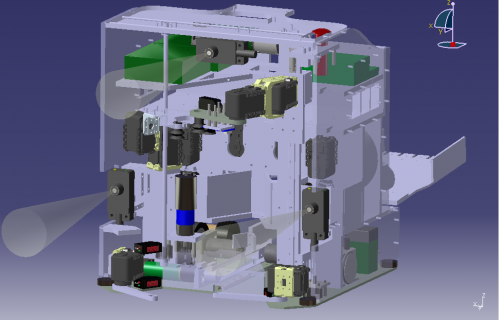
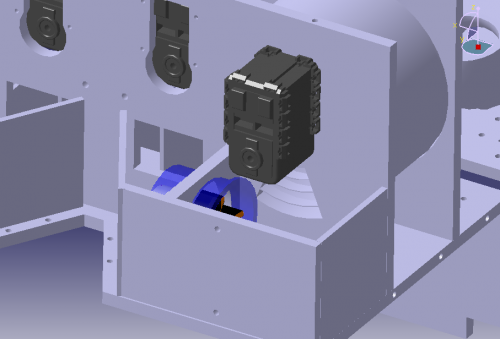
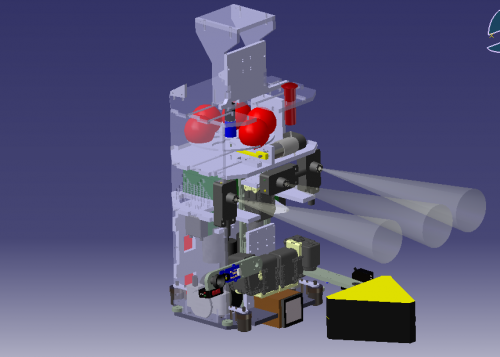
Modélisation sous CATIA V5 du robot principal:
Présentation du robot secondaire :
Le petit s’occupe de déposer les fresques, de projeter les lances, de voler des feux adverses, et enfin de lancer le filet sur le mamouth.
Le système feux comprend 2 bras 3 axes motorisés par des AX12. Ces bras sont munis de ventouse pour manipuler les feux. Le robot peut ainsi les retourner ou encore aller piller les zones bonus adverse. Le robot détecte la couleur des feux grâce à un capteur couleur situé sur le devant du robot.

Sur l’axe Z des bras nous avons mis en place un télémètre laser permettant de scanner les zones bonus et d’aller piller la zone si besoin.
Le système lances est composé d’un barillet asservi en position à l’aide d’un petit motoréducteur et la catapulte projette les lances sur le mammouth grâce a un petit motoréducteur de rapport 4:1.

Le système filet se compose de 2 tiges en PVC retenu par une gâchette. Celles-ci sont actionnées par un AX12 et les tiges se comportent comme un ressort projetant ainsi le filet sur le mammouth à plus de 1 mètre de distance.
Fiche technique:
- 2 motoréducteurs propulsions
- 2 motoréducteurs asservi en position
- 6 servomoteurs AX12
- 2 pompes à vide à piston
- 1 télémètre laser
- 7 capteurs
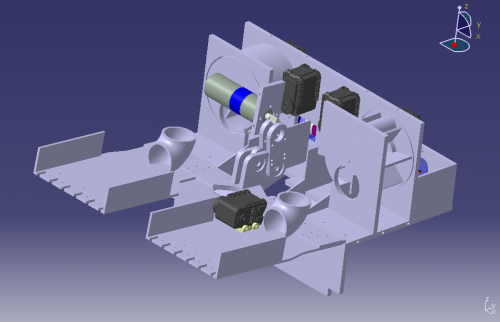
Modélisation sous CATIA V5 du robot secondaire:
Électronique
L’électronique de nos deux robots repose sur nos cartes PLVL et carte moteurs.
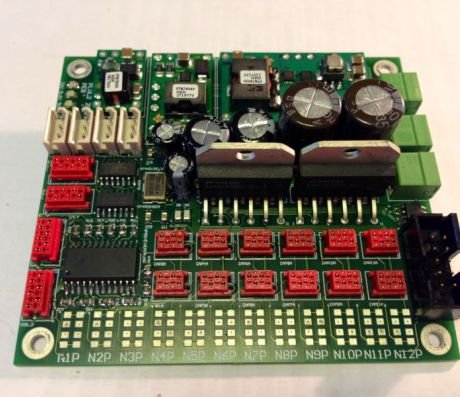
carte PLVL
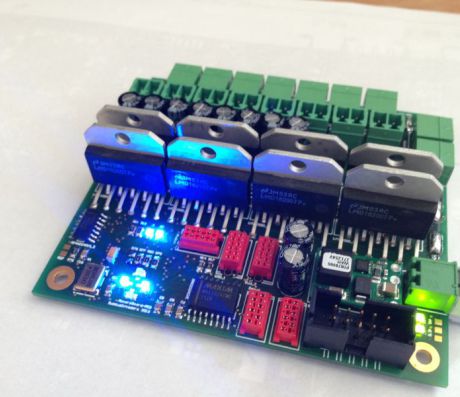
carte moteurs
Le hardware étant au point, il s’agit exactement des mêmes cartes que l’année passée.
Cependant nous avons revu la partie logiciel afin de répartir différemment les tâches de chaque carte.
Ainsi cette année nous utilisons un jeu de deux cartes PLVL dans chaque robot (plus une carte moteur dans le robot 1). La première carte PLVL est dédiée à l’ordonnancement des tâches stratégiques et d’automatismes alors que la seconde se charge des calculs d’asservissement du robot.
Ainsi ce jeu de cartes nous permettait de gérer, sur le robot 2 :
– 6 servomoteurs AX12
– 6 moteurs
– 4 encodeurs
– 12 capteurs
sur le robot 1, avec l’aide d’une carte moteur en plus :
– 10 servomoteurs AX12
– 10 moteurs
– 5 encodeurs
– 15 capteurs
Une liaison I2C permet d’établir une communication entre toutes les cartes.
Si vous souhaitez plus d’informations au sujet de nos cartes électroniques, je vous invite à visiter les pages de nos robots précédent.
Logiciel
Pas mal de nouveauté cette année du côté software!
Nucleus :
Tout d’abord l’évolution de notre système de commande, Nucleus (rien à voir avec l’OS 😉 )
Ce système maison est une sorte de shell tournant sur nos Dspic. Il permet de contrôler l’ensemble des I/O de nos cartes, les réglages de l’asservissement, des automs,… depuis un PC/Mac. Il a été grandement amélioré et supporte désormais la communication via le wifi. Fini le robot qui se prend dans les câbles!
L’ensemble des logiciels présentés ci-dessous repose sur Nucleus.
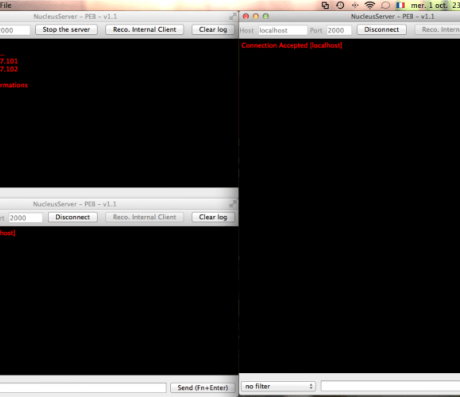
Nucleus Server :
L’ensemble de nos logiciels (et vous allez constater qu’il y en a pas mal 🙂 ) fonctionnent tous en synergie à l’aide d’un server qui dispatche les informations souhaitées. Son rôle est de rediriger l’ensemble des données provenant des cartes électroniques vers les clients que nous allons vous présenter.
Interface avec Nucleus Server
AversiveConfigurator :
Afin de faciliter les réglages de l’asservissement, nous avons développé une interface graphique permettant de visualiser l’ensemble des paramètres actuellement utilisés par le robot. Nous pouvons ainsi affiner les réglages de l’odométrie et de l’asservissement plus facilement.
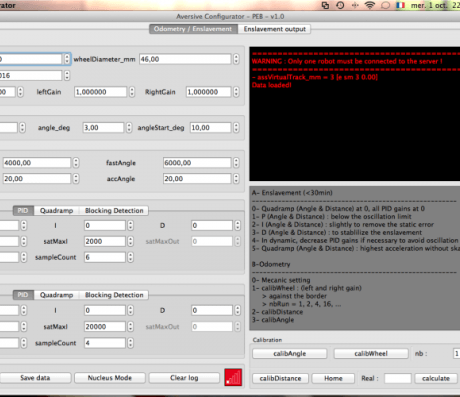
Ecran de réglages d’AversiveConfigurator
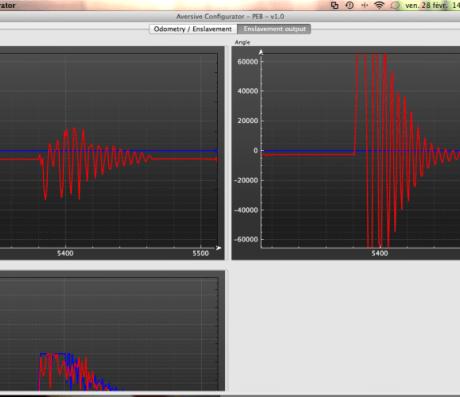
Ecran des courbes d’asservissement en live
AvoidGUI :
Un système d’évitement adversaire et d’obstacles a été développé cette année.
Son rôle est double :
– gérer l’activation des US avant/arrière en fonction de la position du robot sur le terrain, de son angle et du sens de déplacement
– trouver une trajectoire alternative en cas de rencontre inopinée
Le principe est assez simple pour le contournement : nous avons 5 méthodes de contournement d’obstacles, le module logiciel d’évitement les tests les une après les autres, de la plus optimisée en distance à la moins optimisée, jusqu’à trouver une solution. Pour avoir un aperçu visuel, une interface a été codée. Cette dernière récupère les données retournées par chaque traitement et les affiche. Les résultats à la coupe ont été assez encourageant, malgré quelques collision avec le rond central (un détail je vous dis, un détail :p ).
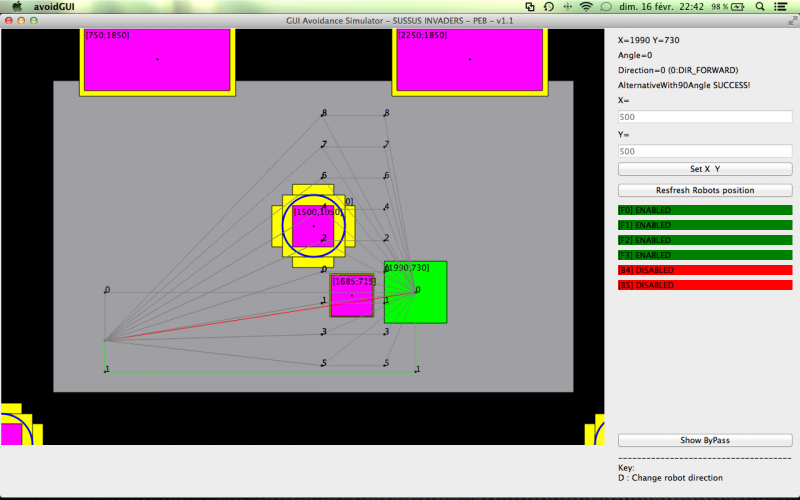
Visualisation du contournement retenu en vert et des US actif à droite
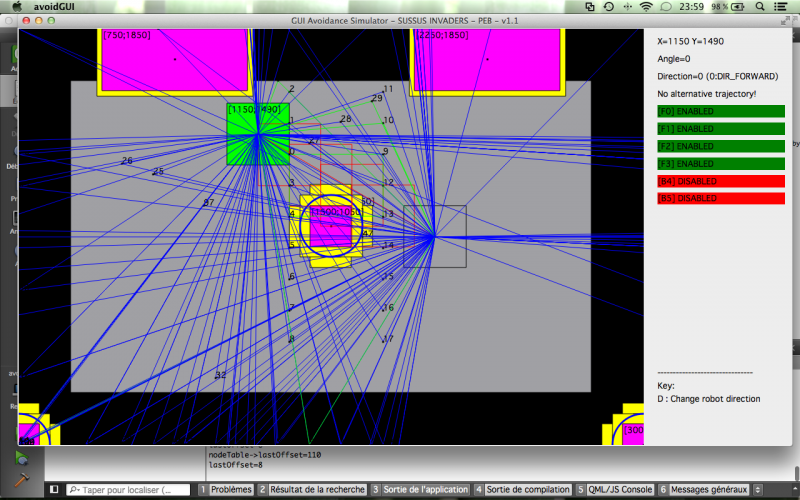
ah… les collisions avec le rond central venait peut être de ça en fait^^
StrategyManagerGUI :
Gros progrès au niveau intelligence cette année (pour les robots du moins^^).
Ces derniers sont capables de choisir leur stratégie de façon dynamique, en fonction de plusieurs paramètres : priorité, temps de match, points, dépendance entre tâches…
Afin de valider ce module, rien de mieux qu’une petite interface graphique bien évidement 🙂
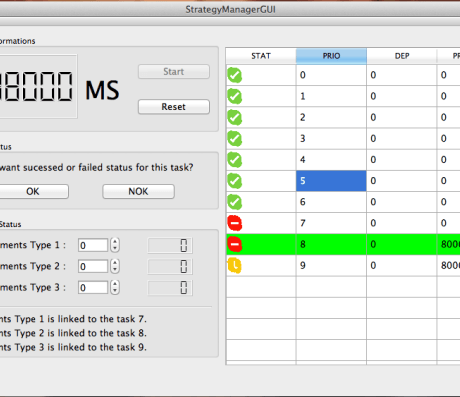
L’interface de validation
RtiGUI :
Dernier logiciel, une interface permettant de visualiser les déplacements du robot sur le terrain. L’intérêt est de confronter visuellement les déplacements vu par l’asservissement et vu en vrai par nos yeux émerveillés. Cela nous permet ainsi de voir clairement si un décalage de position est causé par des problèmes d’odométrie ou par des mauvaises coordonnées lors d’un contournement ou autre.