Robots 2013
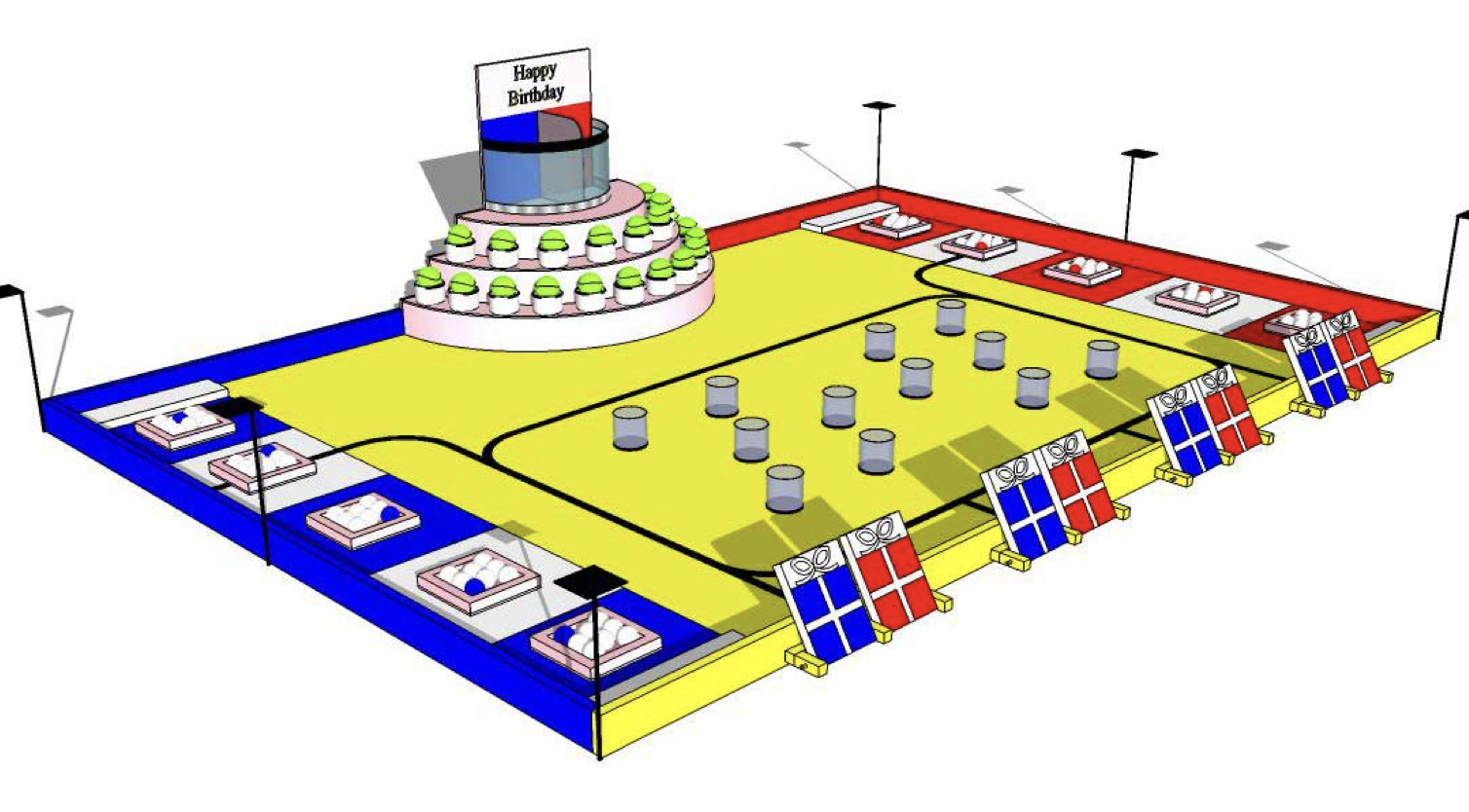
Règlement 2013 : Happy Birthday !Mécanique
Pour suivre l’évolution des robots et les réactions de la communauté du site usinages.com, c’est par ici.
Le concept :
- Le robot secondaire apporte les assiettes au robot principal puis s’occupe des cadeaux et des bougies
- Le robot principal s’occupe des verres et du tire des cerises
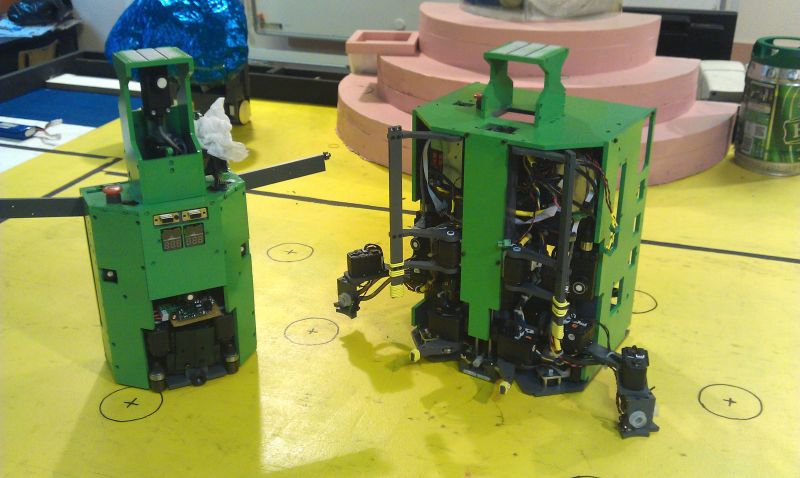
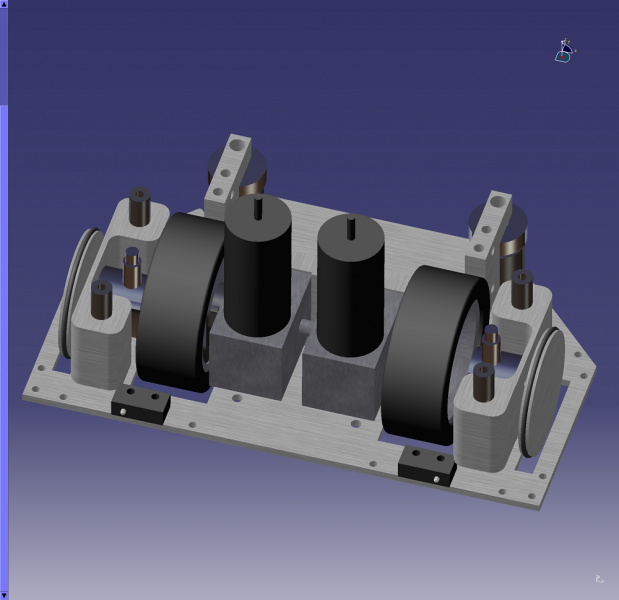
Le robot secondaire
Ci-dessous le modèle 3D sous CATIA V5 de la base roulante du robot secondaire :
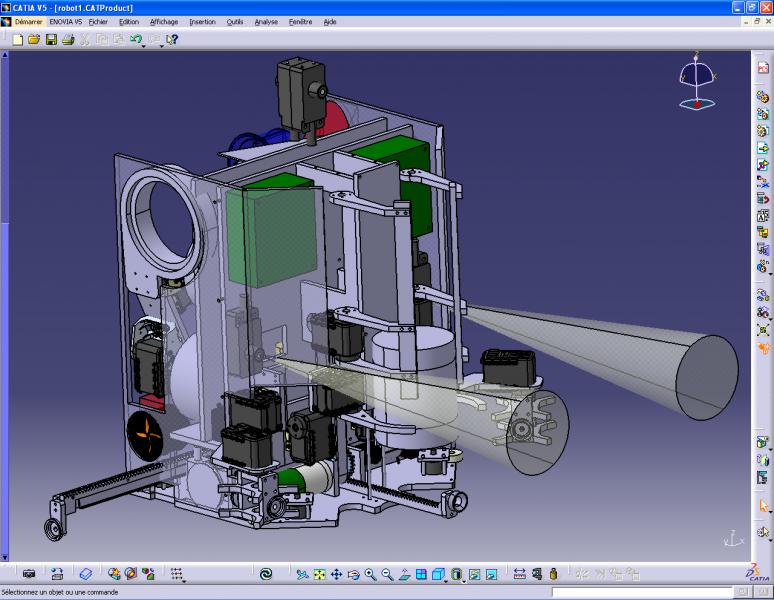
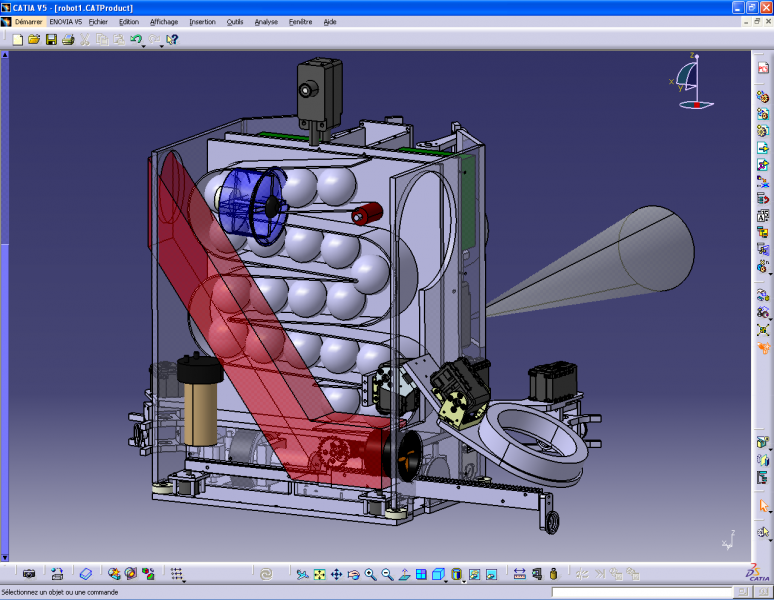
Le robot principal
Ci-dessous le modèle 3D du robot sous CATIA V5 :
Électronique
L’électronique du robot se compose de 2 cartes 80mm * 90mm.
La carte PLVL2 est une carte très polyvalente. Elle peut gérer des moteurs, des servo-moteurs (AX12), et des capteurs. Cette carte est le cerveau du robot et s’occupe de la stratégie et des automatismes.
La carte Moteurs est dédiée à la gestion de moteurs. Elle permet de commander les moteurs en vitesse ou faire des asservissements de position.
Composition de l’électronique du robot principal :
- 2 cartes PLVL2
- 1 carte Moteur
- 2 LIPO 14.8V en série 4000mAh 20C
- 1 LIPO 14.8V 45C pour la turbine
Composition de l’électronique du robot secondaire :
- 2 cartes PLVL2
- 2 LIPO 14.8V en série 2200mAh 20C
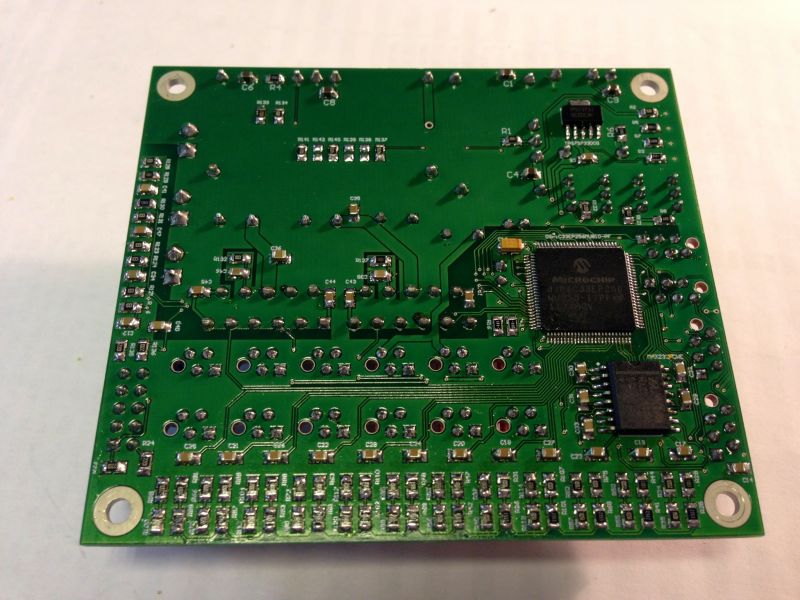
La carte PLVL2
- 1 dspic 33E
- 2 LMD18200 + limitation de courant
- 1 chaine AX12
- 1 RS232
- 2 I²C
- 12 Capteurs (Analogique/Numérique)
- 2 codeurs incrémentaux
Les cartes PLVL2 terminées :
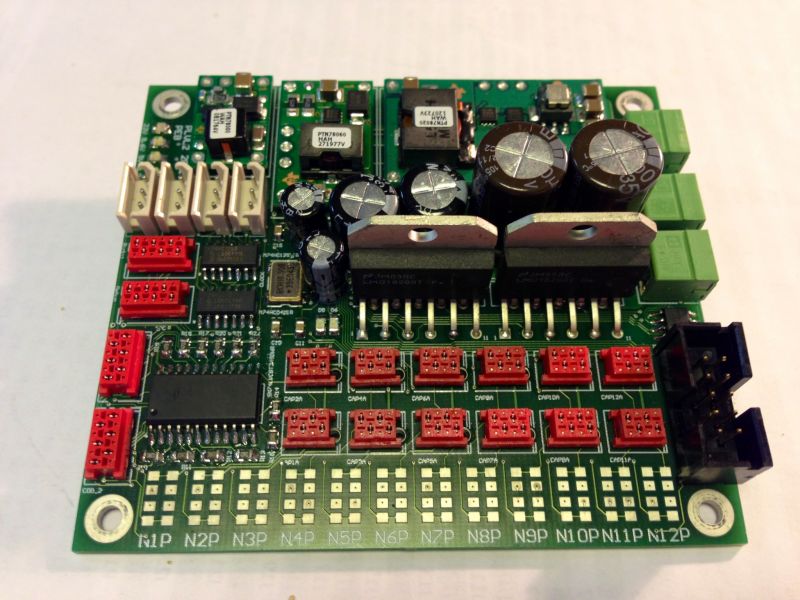
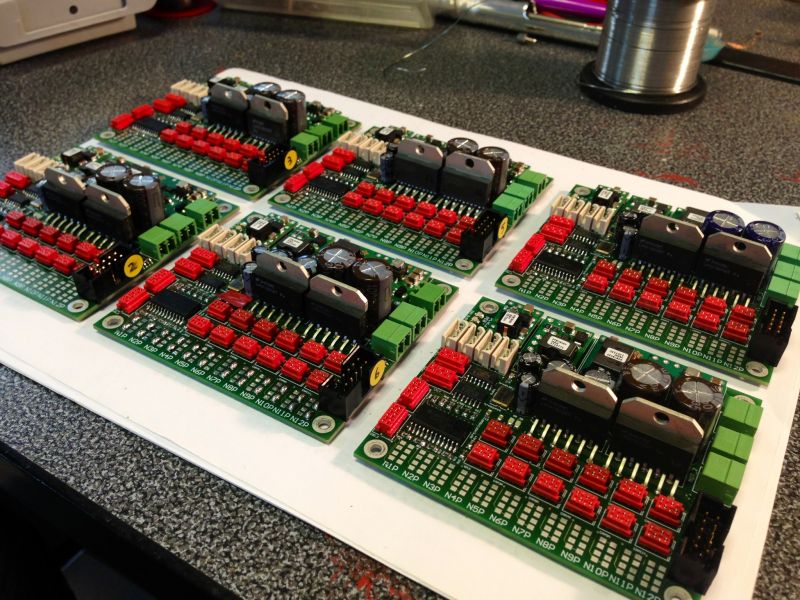
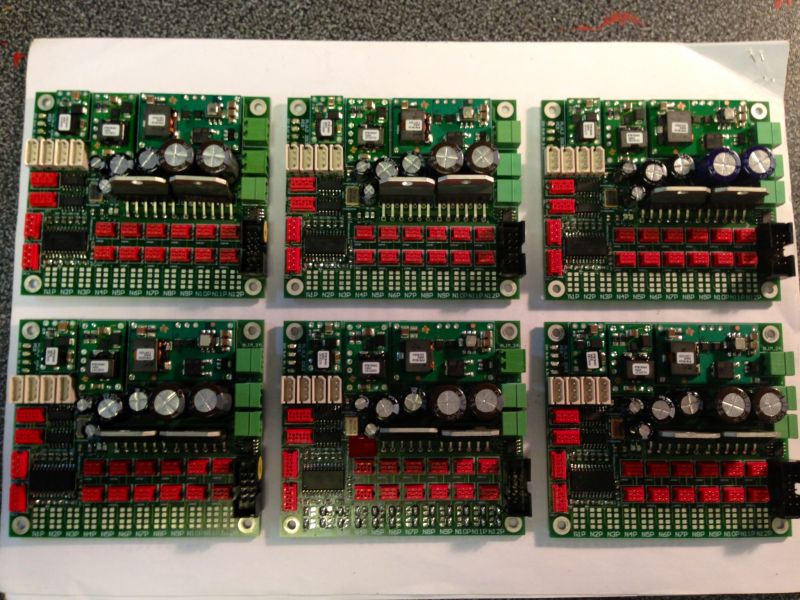
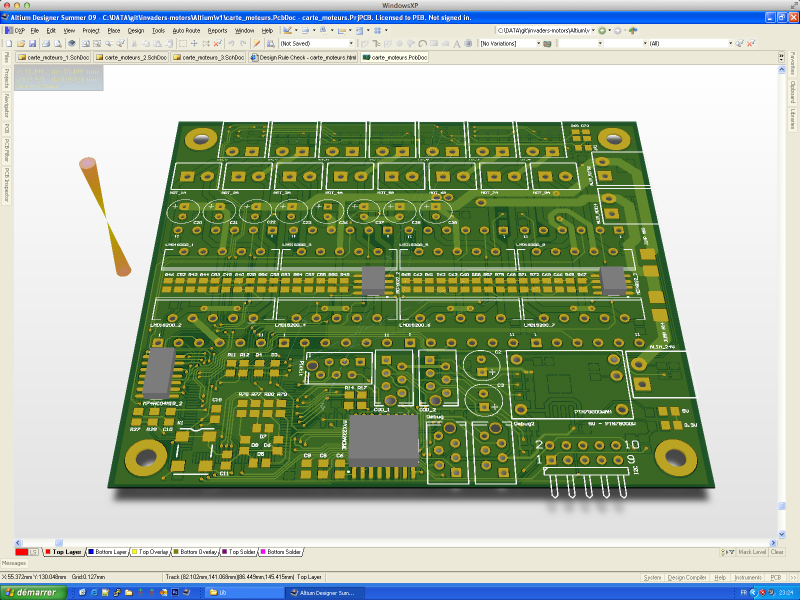
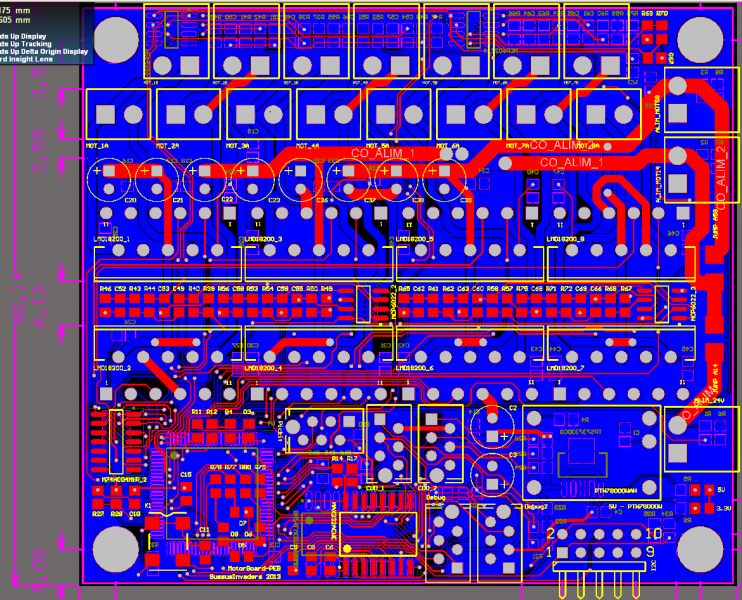
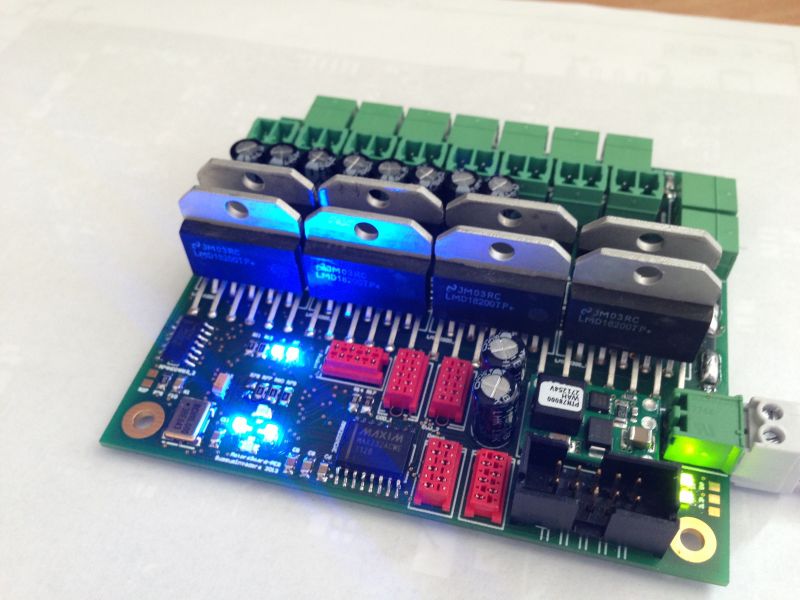
La carte Moteurs
- 1 dspic 33E
- 8 LMD18200 + limitation de courant
- 2 RS232
- 1 I²C
- 2 codeurs incrémentaux
La carte en fin de routage :
La carte finale :
Sponsors
Un grand merci à Wurth, Festo et SAS Automotive pour leur soutien !